九大で河道閉塞の無人化復旧を公開実験、熊谷組が新開発ロボットシステム適用:無人化施工
熊谷組は、九州大学 伊都キャンパスで、河道閉塞の模擬環境で建機遠隔操作の公開実験を実施した。河道閉塞発生時の迅速かつ安全な応急復旧を可能にする無人化施工の技術確立を目指す。
熊谷組は2025年7月10日、福岡市の九州大学伊都キャンパスで、河道閉塞の模擬環境を用いたロボットシステムの公開実験を行った。この実験は、ムーンショット型研究開発事業「CAFEプロジェクト(PM:筑波大学 教授 永谷圭司氏)」の一環であり、河道閉塞による2次災害を防ぐ技術確立を目的としている。
実験では、模擬環境で新たに開発した走行路補強マットの設置やポンプの運搬、ホース固定用杭の打ち込みといった一連の排水作業を無人化施工で行い、その有効性を確認した。
小型の油圧ショベルと不整地運搬車を遠隔操縦して復旧作業
ムーンショット型研究開発事業では、自然災害の中でも、特に斜面崩壊などで川が堰(せ)き止められることで発生する「河道閉塞」に着目。放置すると、上流部に溜まった水が閉塞箇所を決壊させ、下流の広範囲に2次被害を及ぼす危険性がある。
そのため、上流部の湛水(たんすい)箇所から下流へ水を流す排水作業を迅速に行うことが求められる。従来は作業員が0.4〜0.5立方メートル級の大型建機に搭乗して排水ポンプを設置していたが、水際斜面の作業には危険が伴った。山間部では大型建機を分解して運搬する必要があり、迅速な初動対応が困難だった。
そこで熊谷組は、令和3(2021)年度からムーンショット型研究開発事業に参画。ヘリコプターで分解せずに運搬できる小型建機を遠隔操作し、大型建機と同等以上の性能で排水作業を可能にするロボットシステムの開発に取り組んでいる。

今回実験で用いた技術は、建設ロボット(油圧ショベル、不整地運搬車)、応急復旧システム、マシンガイダンスシステム、ROS(Robot Operating System)で構成される。
河道閉塞の水際は地盤が軟弱で、建機が走行できないため、運搬が容易で建機の走行路を確保できる走行路補強マットを開発した。マットは、合成繊維織物と塩ビ管から成り、1平方メートル当たりの質量は7.42キロと、敷鉄板の24分の1の軽さを実現している。
マットはロール状で不整地運搬車が運搬し、油圧ショベルが水際で展開して走行路を確保する。

応急復旧システムとなるポンプの設置作業では、不整地運搬車を遠隔操作して河道閉塞の水際まで走行させ、ベッセルを上げてフレームに固定された排水ポンプを河道閉塞の水際へ設置する。その後、下流側へ走行することで、ホースや電源ケーブルを巻き出す。油圧ショベルは、ポンプ本体を設置したフレームの後方に別のフレームを連結し、小型建機の作業半径を拡張する。最後に、後方からポンプフレームを押し出し、水中に排水ポンプを配置する。
ポンプによる排水の際、通水直後にホースが暴れて他のポンプのホースと絡まり、破損した事例が報告されている。ホースの暴れを防止する目的で、ホースを固定するために油圧ショベルで杭を打ち込みむ。

建設ロボットは熊谷組が開発したもので、遠隔操作が可能な他、さまざまな形状の物体をつかめるロータリーフォークを備える。ロボットにはGNSSやIMUセンサーを搭載し、履帯の方位角や排土板角度をリアルタイムで把握できるマシンガイダンスシステムを搭載。軟弱地盤や半水中でも、安定した走行やポンプ設置が可能になる。
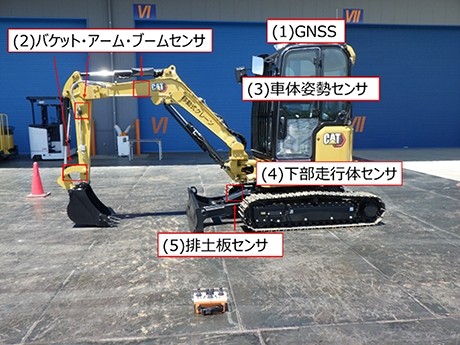 センサ搭載位置図 出典:熊谷組プレスリリース
センサ搭載位置図 出典:熊谷組プレスリリース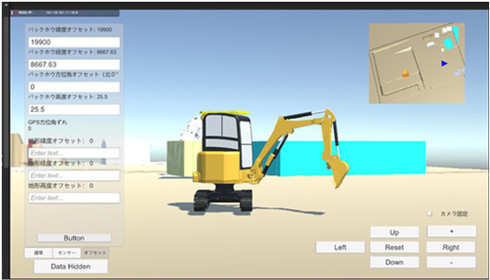 マシンガイダンス表示画面 出典:熊谷組プレスリリース
マシンガイダンス表示画面 出典:熊谷組プレスリリースさらに、ROS(Robot Operating System)の採用で、最大2台の不整地運搬車の位置を外部シミュレーション空間にリアルタイムで反映させた。システム上では、車両運行PC(車両の運行を総合的に制御するPC)と遠隔操作PC(遠隔操作用レバー情報を転送するPC)、車両PC(車両側の制御PC)の間に、ROS Controller用PCが介在する。不整地運搬車の運転中にGNSS機器で位置情報を周期的に取得し、Odometry形式で外部シミュレーション空間へと情報転送する仕組みだ。
自動走行システムとUDP(User Datagram Protocol)通信で連携しつつ、最大で2台の不整地運搬車の動きをシミュレーション空間内に反映できることを確認している。

熊谷組は今後、沈砂池などでのフィールド試験を経て、社会実装を目指す方針だ。
関連記事
 スマートメンテナンス:96%の自治体で水道料値上げに WOTAが上下水道に依存しない水循環システムとファンドで自治体支援
スマートメンテナンス:96%の自治体で水道料値上げに WOTAが上下水道に依存しない水循環システムとファンドで自治体支援
WOTAは、上下水道の老朽化に伴う自治体の財政悪化を防ぐため、資金面で支援するファンド「Water 2040 Fund」を立ち上げた。大規模な水インフラに依存しない独自開発の「分散型水循環システム」と、その導入費用などを拠出する100億円規模のファンドの両輪で、水道管網の更新や財源確保に課題を抱える自治体でも、持続可能な次世代水インフラを整備可能になる。 デジタルファブリケーション:土が主原料の3Dプリンタ住宅が完成、AI活用で完全自動建設目指す Lib Work
デジタルファブリケーション:土が主原料の3Dプリンタ住宅が完成、AI活用で完全自動建設目指す Lib Work
Lib Workは、土を主原料とした一般住宅用3Dプリンタ住宅の新モデル「Lib Earth House model B」を熊本県山鹿市に完成させた。2026年1月から受注を開始する。今回の取り組みについて、生成AIによる設計と3Dプリンタによる施工を融合した完全自動住宅建設への第一歩と位置付けている。 スマートメンテナンス:メーター画像をAI解析、設備点検作業をデジタル技術で効率化 NTTドコモビジネスなど
スマートメンテナンス:メーター画像をAI解析、設備点検作業をデジタル技術で効率化 NTTドコモビジネスなど
NTTドコモビジネスとNTTドコモソリューションズ、東芝は、設備点検業務のDXにより業務効率化とコスト削減を図る新サービスの提供を開始した。 スマートメンテナンス:洋上風力の水中点検を無人化、海洋ロボの実証開始 東洋エンジニアリングなど
スマートメンテナンス:洋上風力の水中点検を無人化、海洋ロボの実証開始 東洋エンジニアリングなど
東洋エンジニアリングなど4社は、自律型海洋無人機と無人潜水機を利用して、洋上風力設備の水中点検作業の自律/無人化を目指す実証事業を行う。 FM:名古屋駅直結の「JRセントラルタワーズ」で、AI活用のサブスク型省エネサービス本格運用
FM:名古屋駅直結の「JRセントラルタワーズ」で、AI活用のサブスク型省エネサービス本格運用
大成建設は、AIを活用して、既存の空調システムを改修することなく運転を最適に制御できるクラウド型街区エネルギー管理システムを開発した。JR名古屋駅直結の超高層複合施設で2025年12月から本格運用を開始する。 建設DX研究所と探る「建設DX最前線」(3):労働人口の減少が迫る建設業界で広がる映像DX【セーフィー解説】
建設DX研究所と探る「建設DX最前線」(3):労働人口の減少が迫る建設業界で広がる映像DX【セーフィー解説】
建設DXの推進を目的に建設テック企業が中心となり、2023年1月に発足した任意団体「建設DX研究所」。本連載では、建設DX研究所のメンバー各社が取り組む、建設DXの事例や技術開発について詳しく解説していきます。今回は、セーフィーが提供する映像による建設DXについて紹介します。
Copyright © ITmedia, Inc. All Rights Reserved.
人気記事トップ10
- クボタが“原点回帰”のオレンジ色に一新 8トン中型建機を日本市場に投入
- ボルボ建機のフラグシップ機が日本上陸 都市部の狭小地でも36トン級のパワー発揮
- 建設現場で3Dデータ活用が進まない理由と突破口【ローカスブルー解説】
- 電動建機ユーザーへ移動給電、コマツらが28年度までに事業化へ
- 「楽楽精算」に5つのAI機能実装、2030年までに完全自動化目指す
- 生コン工場のモルタルをミキサー車で直送、3D建設プリンタの施工を実証
- 無電源/無通信でもドローンポート活用 太陽光パネル/蓄電池/Starlinkをセット提供
- 遠隔施工ロボットを国内トンネル工事に適用、西松建設の現場に適用 ガデリウス
- 掃除ロボとエレベーターが自動連携、41階建て新築分譲マンションに導入 掃除機掛けの約6割を代替
- 空に「道」をつくる! ブルーイノベーションが台湾Aeroprobingと提携





![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。