メーカーが異なる複数台のロボットを連携管理、システムの有効性を確認:ロボット
鹿島建設は、大規模複合施設「HANEDA INNOVATION CITY」にて、メーカーが異なるロボットの複数台導入時に必要となる基盤システムの実証実験を実施し、有効性を確認した。
» 2023年06月29日 08時00分 公開
[BUILT]
鹿島建設は2023年5月11日、大規模複合施設「HANEDA INNOVATION CITY」にて、メーカーが異なるロボットの複数台導入時に必要となる基盤システムの実証実験を実施し、有効性を確認したと発表した。
同システムは、ロボット同士の連携機能、ロボットとエレベーターとの連携機能、ロボットの統合管制システムで構成される。
ロボット同士の連携機能とは、メーカーにより異なる制御システムを有する複数台のロボットの情報を集約し、各ロボットに指示することでロボットを連携制御するものだ。同一施設内を走行するロボットの配送能力向上や衝突防止に寄与する。
ロボットとエレベーターとの連携機能は、各種ロボットによるメーカーが異なる複数台のエレベーターへのスムーズな乗降を可能とする。
ロボットの統合管制システムは、各ロボットの状況をモニタリングし、システムエラーなどが発生した際に施設管理者へ通知するものとなっている。
これらの機能を用いることで、各ロボットが上下階の移動を含めて同一施設内で自由に走行できる環境や、各ロボットを一元管理できる体制を構築できる。
同社は今後、同システムの本格実装に向けて機能を拡充するとともに、他の大規模施設などへの展開を図る。
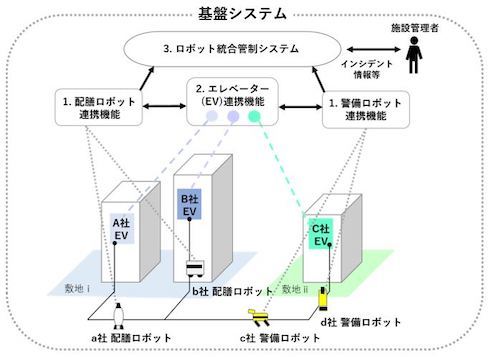 基盤システムのイメージ 出典:鹿島プレスリリース
基盤システムのイメージ 出典:鹿島プレスリリース関連記事
 東京港区の複合施設でEVと連携するロボの実証実験を実施、三菱地所とパナソニック
東京港区の複合施設でEVと連携するロボの実証実験を実施、三菱地所とパナソニック
パナソニックは、経済産業省の補助事業「令和3年度革新的ロボット研究開発等基盤構築事業(ロボットフレンドリーな環境構築支援事業)」を受託した三菱地所に、ロボットメーカーとして協力し、東京都千代田区の複合施設で搬送ロボットとロボット掃除機の実証実験を行った。 複数のロボットを制御するプラットフォームと非接触で乗れるエレベーター、三菱電機
複数のロボットを制御するプラットフォームと非接触で乗れるエレベーター、三菱電機
三菱電機は、施設内でのロボットと人の移動を効率化するビルIoTプラットフォーム「Ville-feuille」と機械室レス・エレベーター「AXIEZ-LINKs」を開発した。 建物の設備・ロボット・自動運転車の統合制御システムを技術研究所に構築、清水建設
建物の設備・ロボット・自動運転車の統合制御システムを技術研究所に構築、清水建設
清水建設は、同社の技術研究所で建物の設備やサービスロボット、自動運転車を統合制御するシステム「Mobility-Core」を構築した。今後は、施設および街区に自律型モビリティを活用したサービスを実装するために、日常的に人が活動する環境下で、複数のモビリティが連携するサービスの技術検証を進めていく。 大成建設がロボット統合管制プラットフォームを開発、異なるメーカーのロボットを連携
大成建設がロボット統合管制プラットフォームを開発、異なるメーカーのロボットを連携
大成建設は、施設内で稼働するさまざまなロボットの運用や建物設備との連携を一元管理するロボット統合管制プラットフォーム「RoboHUB」を開発した。RoboHUBは、適用することで、異なるメーカーの多様な機能を持つロボットを同時に接触なく稼働させ、設置されている建物設備との連携などが可能。今後は、大成建設が設計・施工を手掛けた病院で、ロボット運用計画や建物設備との連携を踏まえた施設設計を行い、2023年1月に運用を開始する。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
Special ContentsPR
特別協賛PR
スポンサーからのお知らせPR
Special ContentsPR
Pickup ContentsPR
人気記事トップ10
- クボタが“原点回帰”のオレンジ色に一新 8トン中型建機を日本市場に投入
- ボルボ建機のフラグシップ機が日本上陸 都市部の狭小地でも36トン級のパワー発揮
- 建設現場で3Dデータ活用が進まない理由と突破口【ローカスブルー解説】
- 電動建機ユーザーへ移動給電、コマツらが28年度までに事業化へ
- 無電源/無通信でもドローンポート活用 太陽光パネル/蓄電池/Starlinkをセット提供
- 生コン工場のモルタルをミキサー車で直送、3D建設プリンタの施工を実証
- 「楽楽精算」に5つのAI機能実装、2030年までに完全自動化目指す
- 遠隔施工ロボットを国内トンネル工事に適用、西松建設の現場に適用 ガデリウス
- 空に「道」をつくる! ブルーイノベーションが台湾Aeroprobingと提携
- 日立建機らのリアルタイムデジタルツインを用いた遠隔施工に参画、ユニキャスト





あなたにおすすめの記事PR
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。