大林組が建設現場の資材搬送を自律化するロジスティクスシステムを開発:ロボット
大林組は、AGVとエレベーターを連携して制御し、階数を問わずに建設資材の自律的搬送を可能とするロジスティクスシステムを開発した。作業員の負担軽減と安全な自律ロジスティクスを両立できる技術として、建設現場への導入を進めていく。
大林組は2020年2月19日、建設現場内の資材搬送において、AGV(Automated Guided Vehicle 無人搬送車)とエレベーターを連携制御することで、階数を問わずに自律的な搬送を可能とするロジスティクスシステムを開発したと発表した。
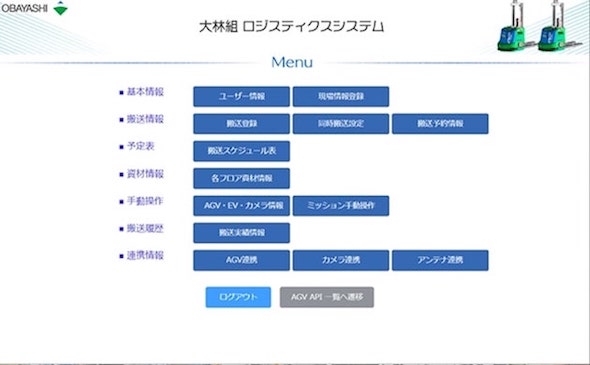 ロジスティクスシステムの操作画面 出典:大林組
ロジスティクスシステムの操作画面 出典:大林組本システムを稼働させる場合、あらかじめ各フロアを複数エリアに区分した上で、搬送元と搬送先のエリアを指定して資材の搬送スケジュールを入力する。
建設現場内に設置した複数の天井カメラの映像から資材の位置をシステムが認識すると、事前に用意した地図に従って搬送先まで自律的に経路を設定する。同時に、複数のAGVに搬送指示を与え、エレベーターも連動して制御する。
 搬送先はシステムが自動設定する 出典:大林組
搬送先はシステムが自動設定する 出典:大林組作業時間中に利用する場合は、天井カメラが作業員を検知し、人数の多いフロアへ優先的に自動でエレベーターを呼び出すため、資材の揚重効率を下げることはない。搬送スケジュールが変更がされた場合でも、管理者が搬送先を修正するだけで、システムが自動でAGVとエレベーターの制御を組み替えられる。
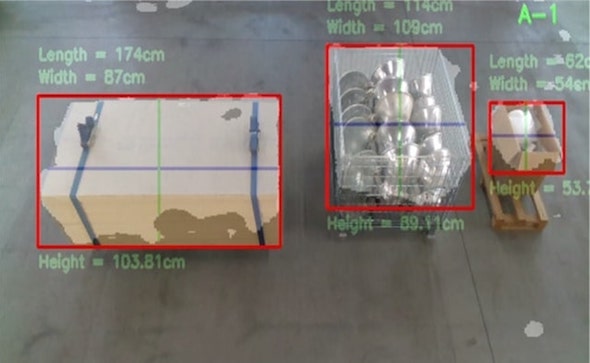 天井カメラからは資材のサイズも細かく確認できる 出典:大林組
天井カメラからは資材のサイズも細かく確認できる 出典:大林組本システムの指示下で動作するフォークリフト型AGVは、大林組とスイスStoecklin Logistikが新たに共同開発した。レーザーセンサーで計測した資材幅に合わせた安全領域を自動設定し、最適経路を選択する自律走行ナビゲーションテクノロジー「ANT」を搭載している。本システムはANTとAPIを介して各情報を交換し、状況に応じた指令をAGVへ送信する。

建設現場の天井に設置したカメラの俯瞰(ふかん)画像によって、荷物の位置と置き方に問題がないかをチェックできるほか、作業領域への人の侵入をAIが瞬時に検知し、危険と判断した場合には、速やかににAGVの動作を停止するなど、安全な自律ロジスティクスの要請にも応える性能を持つ。
 作業領域へ侵入した人の動きを天井カメラとAIで瞬時に検知する 出典:大林組
作業領域へ侵入した人の動きを天井カメラとAIで瞬時に検知する 出典:大林組従来システムとは異なり、メインサーバが複数のAGVとエレベーターの状況を把握し、各AGVが備える安全装置と併せて統合的に管理することで、安全性がさらに高まった。管理者はタブレットなどの端末でAGVの位置やエレベーターの稼働状況を常時監視できるため、異常があれば即座に対応できる。

大林組は、これまでもフロア内で資材を自動搬送するAGVを開発してきたが、搬入した階から上層階への揚重の際は、作業員を介在させてエレベーターを操作する必要があった。
本システムの場合、Web上で入力した資材の搬送スケジュールに基づき、搬入階から目的地までの搬送を完全に自動化できるため、作業員は資材運搬作業から解放され、施工業務に専念できる。
今後について同社は、2020年春から本システムを複数の建設現場に導入して効果を検証していくとともに、従来の低床式AGVも本システムの指示下で制御できるように改良し、工事条件に合わせて最適なAGVを導入できる体制を構築していくとしている。
関連記事
 三井住友建設が鉄筋組立自動化システム「Robotaras」を本格導入
三井住友建設が鉄筋組立自動化システム「Robotaras」を本格導入
三井住友建設は、三田川PC工場における軌道スラブの鉄筋組立作業に、ロボットアームを用いた鉄筋組立自動化システム「Robotaras(ロボタラス)」の本格導入を開始した。 斜張橋の長寿命化に役立つ装置を開発、斜材保護管内部の水分を測定可能
斜張橋の長寿命化に役立つ装置を開発、斜材保護管内部の水分を測定可能
国土交通省の資料によれば、橋梁(きょうりょう)は高度成長期に大量に建設されており、2020年代には、その多くが完工後から55年以上を迎える。さまざま要因により、橋の経年劣化が進む中、メンテナンスや状態の可視化は急務だ。こういった状況の中、西松建設は佐賀大学の伊藤幸広教授と共に、自走式調査ロボット「コロコロチェッカー」と併用することで、斜材保護管内部の水分量を測れる「水分測定装置」を開発した。 鉄骨柱の溶接でロボット用の新工法、継ぎ目を削減
鉄骨柱の溶接でロボット用の新工法、継ぎ目を削減
竹中工務店は、溶接ロボットに特化した新工法を開発した。人の作業をロボットが代替することで、熟練溶接技能者の高齢化や減少に対応することが可能になる。 照明の照度測定を2秒で完了、鹿島が開発した自律走行ロボ
照明の照度測定を2秒で完了、鹿島が開発した自律走行ロボ
鹿島建設は、建築工事で竣工直前に多くの手間と時間をかけて実施する照明の照度測定や調整作業を自動で行うロボットを開発した。愛知県と大阪府で施工中の現場に適用して、有用性を確認したという。将来的には、改良を施し、騒音・温湿度の測定にも対象を広げ、設備機器に関する性能検証の省力化・効率化を目指す。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
人気記事トップ10
- 日本一の超高層建築を支える清水建設の現場DX 7000人が働く超大型現場をデジタル化
- ヤンマー建機がホンダ製バッテリー採用 CSPIで新型GX建機を参考出展
- 日立、エレベーターを「フィジカルAI」へ 新型機で設備データ活用を加速
- チェコ発の高さ70cm遠隔電動建機を発売 人が入れない現場で300kgを運ぶ
- 半導体不良や美術品劣化を防ぐ「アンモニア吸着コンクリ」、清水建設が泉美術館に初適用
- 地場コンの現場監督によるボトムアップ型DX、成功の第1歩は「仲間づくり」から
- インフロニアHD、データ主導型経営を支える財務会計システムを3カ月で構築
- ブラザーが東京・京橋に体験型施設を開業、殺陣や書道の体験がTシャツなどの形に
- 三井不レジが新販売拠点「新宿サロン」公開 AR内見などデジタル展示で見学と商談を分離
- 埋設物をバケットで検知 西尾レントオールがCSPIで最新ICT施工と熱中症対策を展示





![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。