BIM/CIM双方向連動自動巡回ロボットシステム「i-Con Walker」を開発:BIM/CIM
イクシスは、BIM/CIM上で自動巡回ロボットの行動計画を設計し、かつ自動巡回ロボットが現場環境から取得した情報をBIM/CIMに反映する「BIM/CIM双方向連動自動巡回ロボットシステム」を開発した。
イクシスは、「BIM/CIM双方向連動自動巡回ロボットシステム(i-Con Walker)」を開発した。同技術では、インフラ関連業界、特に建設業界におけるBIM/CIMを活用した生産性向上の一環として、BIM/CIM上で自動巡回ロボットの行動計画を設計。さらに自動巡回ロボットが現場環境から取得した情報をBIM/CIMに反映する。
i-Con Walkerにより、建設の各フェーズの現場の出来高、出来形、点検結果をリアルタイムにBIM/CIM上に反映し各種情報を属性情報に登録および更新することが可能だ。さらに更新されたBIM/CIM上で自動巡回ロボットの行動計画を設計でき、日々変化する現場環境下においても安定した出来高・維持管理が行える。
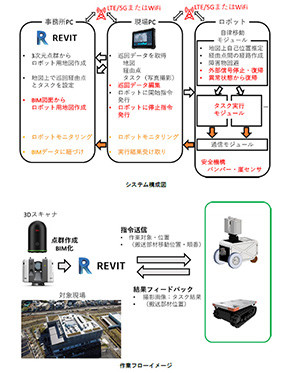 システム構成図と作業フロー 出典:イクシス
システム構成図と作業フロー 出典:イクシス昨今、国土交通省が「ICTの全面的な活用(ICT土工)」などの施策を建設現場に導入することにより、建設生産システム全体の生産性向上を図るi-Constructionを推進しており、測量、設計、施工、検査、維持管理、廃棄更新の建設6フェーズを3次元モデルに連携・発展させ事業全体での情報共有を図るBIM/CIMが活用されてきている。
i-Con Walkerは、最新の現況に更新されたBIM/CIMデータ上で自動巡回ロボットが動作する行動計画を、部材に紐(ひも)づけた中継点を連続的に指定することで設計し、ロボットは中継点間をSLAM(Simultaneous Localization and Mapping)技術などを用いて障害物回避をしながら移動し、中継点で指定された写真撮影、物資移送、施工、3D出来形計測などのタスクを実施する。この結果を部材の属性データIFC(Industry Foundation Classes)に反映する。
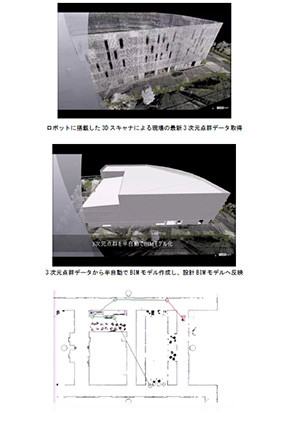 3次元点群データの取得と設計モデルへの反映 出典:イクシス
3次元点群データの取得と設計モデルへの反映 出典:イクシスこれを繰り返すことで一連のタスクを遂行するとともに、BIM/CIMデータを最新情報としてリアルタイムに更新し、遠隔地のBIM/CIMのCADソフト上で、それらの状況をリアルタイムに観察できる。
 自動巡回中の画面イメージ 出典:イクシス
自動巡回中の画面イメージ 出典:イクシスi-Con Walkerにより設計段階で作成したBIM/CIMデータを、日々の更新情報から最終的に出来形BIM/CIMを作成でき、業務の高度化、生産性の向上に寄与する。
関連記事
 日立建機の新型ICT油圧ショベル、上下左右・深さ・高さの稼働エリアを管理可能
日立建機の新型ICT油圧ショベル、上下左右・深さ・高さの稼働エリアを管理可能
日立建機は、従来機より情報化施工の機能を増やした新型ICT油圧ショベル「ZX200X-7」を2021年10月1日に日本国内で発売する。 自動運転する複数の建機を制御し協調運転を実現するシステム、大成建設
自動運転する複数の建機を制御し協調運転を実現するシステム、大成建設
大成建設は、パナソニック アドバンストテクノロジーの独自技術であるロボット自律制御と協調タスクプランニングの技術を活用し、自動運転する複数の建機を制御し協調運転を実現するシステム「T-iCraft」を開発した。 西松建設がGNSSとCIMで、ダム建設工事のケーブルクレーン自動運転技術を開発
西松建設がGNSSとCIMで、ダム建設工事のケーブルクレーン自動運転技術を開発
西松建設は、ダム工事を対象に、GNSS測位技術でコンクリートバケットの位置を取得し、CIMモデルと連携させることで、ケーブルクレーンを自動運搬するシステムを開発した。既に実現場での堤体工で試験運用を開始しており、コンクリート打設工程の時間短縮につながると期待されている。 福井コンピュータ、土木施工管理システムの最新版リリース
福井コンピュータ、土木施工管理システムの最新版リリース
福井コンピュータは、土木施工業向けオールインワンシステム「EX-TREND(エクストレンド)武蔵」の最新版を発売。「簡易型ICT活用工事」の支援を主体とした機能強化を図った。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
人気記事トップ10
- 本田技術研出身者が創業した石川エナジーリサーチ 独自の無振動エンジン搭載ドローンを展示
- 静岡三島の地場コンが実践する「ベストミックス」の現場DX 本当に使える技術を見極めるには
- 国土地理院1級登録のGNSS機も展示、PIX4Dが魅せる最新3Dスキャン手法
- システム天井施工を省人化、天井ボード取付ロボットと移動式作業床を開発 鹿島建設
- 施工現場でケーソンショベル3台同時/6時間連続自動運転を達成、オリエンタル白石
- 建設DXの標準基盤となるクラウド×AIのデジタルツイン、福井コンピュータが開発着手
- 電動建機ユーザーへ移動給電、コマツらが28年度までに事業化へ
- 鉄塔基礎工事の掘削/排土作業自動化へ、関西電力送配電らが共同研究開始
- 「自動物流道路」構想で、清水建設とecoroが温故創新の森で屋外無人物流インフラ検証
- 全機種5G対応&水冷化 BIMや点群の需要に応えるレノボ最新ワークステーション





![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。