維持管理計画にも役立つビル壁面を走行する“打音検査ロボット”、5分で1m2を点検:ロボット(1/2 ページ)
高松建設と青木あすなろ建設は、「壁面走行ロボットによる外壁点検システム」を開発し、2019年8月から実物件で運用を開始する。ビル壁面の点検にロボットを採用することで、足場の仮設が不要となり、コスト削減や点検期間の短縮がもたらされる。
» 2019年07月17日 05時17分 公開
[石原忍,BUILT]
高松コンストラクショングループの高松建設と青木あすなろ建設は2019年7月16日、非破壊検査の協力を得て、ビル壁面を走行する点検ロボットを開発したと発表した。
カメラでひび割れ確認と、打診で打音検査を行う

3社が共同開発した外壁点検システムは、ロボットが壁面を自走して壁面を打診し、診断結果をデータ化して分析・蓄積することで、今まで以上に高精度な診断が実現する。
ロボットは、下部に自走用のローラー、上部には中央にバキュームチャンバーと防音カバー、カメラユニット、自己位置推定ユニット、打診測定器ユニットを搭載。壁面走行の仕組みは、バキュームチャンバーで空気を吸引し、壁面に吸着させながら、ローラーの回転で走行する。最大速度は毎秒6ミリで、19ミリ程度の段差は乗り越えることができ、壁面の材質に左右されず、緩やかな曲面部にも対応する。

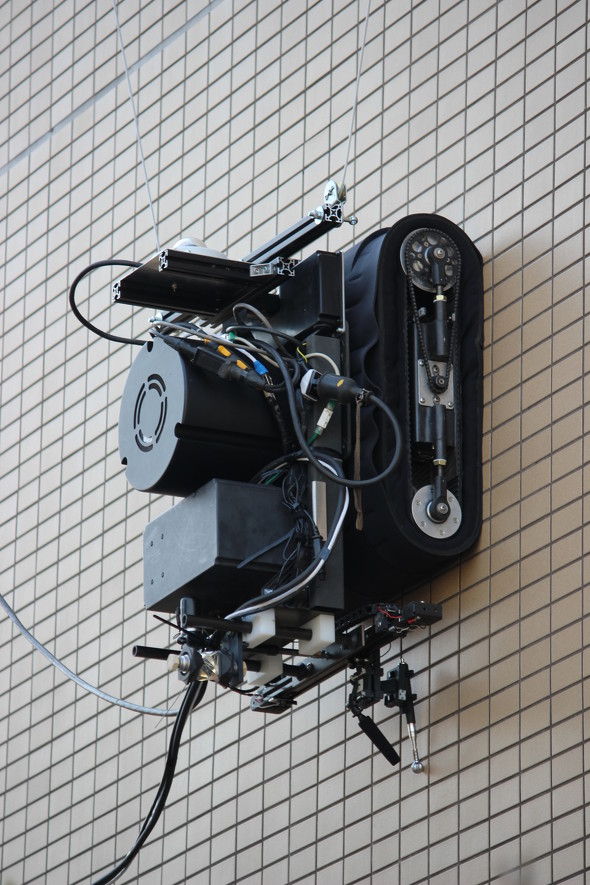 壁面に吸着して走行するロボット 提供:高松建設
壁面に吸着して走行するロボット 提供:高松建設Copyright © ITmedia, Inc. All Rights Reserved.
Special ContentsPR
特別協賛PR
スポンサーからのお知らせPR
Special ContentsPR
Pickup ContentsPR
人気記事トップ10
- 昇降機トップメーカーが技術の裏側公開 日本オーチスが「大人の社会科見学」開催
- 点群データを設計・維持管理で“使える3Dモデル”に アイサンテクノロジーの新提案
- PLATEAUビジョン2026を公表 AIで3D都市モデルの整備/更新を効率化
- 猛暑を乗り切るパナソニック製エアコン「エオリア」 草津生産ラインを50%自動化へ
- 東大赤門が27年秋に復活へ、清水建設が伝統と3D技術で耐震改修
- 点群や3DGSなどの実務利用を支援、3Dスキャナー「Lixel K2」
- 万博「大屋根リング」のデジタルアーカイブ「Record-RING」始動
- 戸田建設、生成AIで安全/品質管理を支援
- スキャン不要の巡回ロボと制御システム BIM/CIMを走行地図や現場管理に活用
- 燃料費を年800万円削減 発電機と蓄電池の次世代仮設電源が建設現場に正式採用





あなたにおすすめの記事PR
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。