熊谷組が複数台の“クローラーキャリア”をAIで制御、阿蘇大橋の土砂運搬に導入:AI(2/2 ページ)
» 2019年04月18日 10時25分 公開
[谷川整,BUILT]
AIによる自動制御は、教示ステップ、分析ステップ、計画ステップ、実行/指令ステップの4段階に分けて行う。教示ステップでは、教示運転を実施して、教示経路データを作成する。分析ステップは教示経路を踏まえ、それぞれの車両サイズなどの条件も加味して、安全な位置関係と衝突の可能性のある危険な位置関係を算出し、安全な状態を特定する。
計画ステップは、経路の始点/終点位置、土砂積載、廃棄などの作業目標を設定。最もコストや時間が少なくなる効率的な運行計画パターンを自動的に作成。これらのステップを経た実行/指令のステップでは、コントローラーのスタートスイッチを押すだけで、複数台のキャリアが自動で運行する。



2018年9月には、阿蘇大橋地区斜面対策工事(熊本県)における土砂運搬の実施工に技術導入し、有効性を確認した。「土留盛土工上部崩壊斜面」内で運用し、オペレーター1人による遠隔操作バックホウ1台と、AI制御のキャリア2台を投入して、土砂積載、運搬、搬出の作業を検証。片道300メートル、勾配最大20%の条件下で、毎時24.6立方メートルを運搬した。
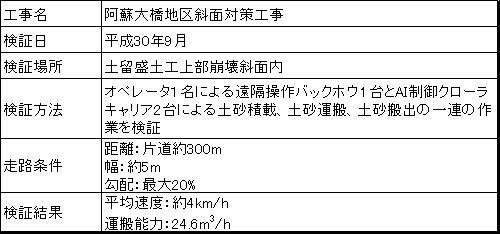 実施工での検証概要 出典:熊谷組
実施工での検証概要 出典:熊谷組

熊谷組は、AIによる自動制御を導入する効果について、運行監視要員の省力化、積み込み機械オペレーターの負担軽減、建機自体の負荷低減、接触事故防止のメリットの他、経路が複雑で長距離である場合にも、応用できる拡張性があることを挙げている。今後については、「現場ごとの条件を反映させ、精密な運行管理やAI学習の蓄積を行っていく」としている。
関連記事
 ドローンで測る建設現場、コマツのスマートコンストラクションが順調に実績拡大
ドローンで測る建設現場、コマツのスマートコンストラクションが順調に実績拡大
コマツは「TECHNO-FRONTIER(テクノフロンティア)2015」内で開催されている「国際ドローン展」に出典。2015年2月から提供を開始した「スマートコンストラクション」を紹介した。 360°自由視点の俯瞰映像で建機の遠隔操作を実証実験、OKI×コマツ
360°自由視点の俯瞰映像で建機の遠隔操作を実証実験、OKI×コマツ
沖電気工業(OKI)が開発した車両周囲を360°のリアルタイム俯瞰映像でモニタリングできる「フライングビュー」と、コマツの建設機械の遠隔制御システムを組み合わせた実証実験が始まった。 「力触覚伝達型遠隔操作システム」と「AI」を連携した“ロボットアーム”の検証、大成建設とエクサウィザーズ
「力触覚伝達型遠隔操作システム」と「AI」を連携した“ロボットアーム”の検証、大成建設とエクサウィザーズ
大成建設とエクサウィザーズは共同で、大成建設の「力触覚伝達型遠隔操作システム」と、エクサウィザーズの「マルチモーダルAI」を組み合わせ、ロボットアームの検証実験を実施した。 ミライト・テクノロージーズがコマツとドローンで業務提携
ミライト・テクノロージーズがコマツとドローンで業務提携
ミライト・テクノロジーズは、注力しているドローン事業で、事業領域を拡大する初弾として、建設機械のコマツと業務提携した。コマツが5月から提供を開始するドローン測量サービスで、パイロット育成や全国の広域ネットワークを活用した運航代行などで全面サポートしていく。
Copyright © ITmedia, Inc. All Rights Reserved.
Special ContentsPR
特別協賛PR
スポンサーからのお知らせPR
Special ContentsPR
Pickup ContentsPR
人気記事トップ10
- クボタが“原点回帰”のオレンジ色に一新 8トン中型建機を日本市場に投入
- ボルボ建機のフラグシップ機が日本上陸 都市部の狭小地でも36トン級のパワー発揮
- 建設現場で3Dデータ活用が進まない理由と突破口【ローカスブルー解説】
- 書類確認をAIが自動化! 「建設サイト・シリーズ」の新機能と現場データ主軸のDX戦略
- 鉄建建設、社内AIチャットに技術伝承機能を追加 ベテランの暗黙知を形式知化
- 無電源/無通信でもドローンポート活用 太陽光パネル/蓄電池/Starlinkをセット提供
- AIでプラント寿命を予測 千代田化工建設とNovityが運用保守で協業
- 遠隔施工ロボットを国内トンネル工事に適用、西松建設の現場に適用 ガデリウス
- “3K”を払拭するアクティオの長野新工場が稼働開始 建機洗浄の自動化など最新設備を導入
- 「楽楽精算」に5つのAI機能実装、2030年までに完全自動化目指す





あなたにおすすめの記事PR
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。