力触覚伝達技術を利用した「遠隔操作システム」を開発
大成建設は、食品や医薬品製造工場向けの遠隔操作システムを開発した。汎用性を持たせるため、ロボットは2本指のシンプルタイプで、微妙な力加減を伝達し、作業手順を記憶させる。
大成建設は2018年7月3日、生産施設向けに、力触覚伝達技術を利用した遠隔操作システムのプロトタイプを開発した。現場にあるロボットアームを力触覚グローブで、離れた場所から操作でき、微妙な力加減を再現する。実用化すれば、工場などに実際に行かなくとも、遠隔地からのモニター越しで、繊細な作業が可能になり、テレイグジスタンス(Telexistence)の環境が実現する。
「力加減」を正確に伝達し、細かい手作業を遠隔化
大成建設では2017年度より、5本指のロボットアームと、これを操作する力触覚グローブを組み合せて、遠隔操作する初期プロトタイプの開発に着手した。遠隔操作システムでは、物体をつかむ際の微妙な力加減の情報を双方向に伝達でき、作業員による手作業をいつでもどこでも遠隔操作することが可能になる。将来的には作業手順や力加減などを学習・再生し、最適な作業パターンの実現を目指す。
しかし、開発過程において、システム構成が複雑で、かつ操作者によるロボットハンドなどの動作制御が難しく、一般ユーザーの操作習熟には時間や経験を要するという課題が生じていた。
大成建設は、力触覚伝達技術の普及展開を進める上で、障壁となりうる上記課題を解決すべく、2017年度開発した初期プロトタイプを改良し、システム構成、形状、操作性の単純化について検討を進めてきた。

今回、開発したプロトタイプは、実際の生産現場にも導入しやすい汎用品を用い、ロボットの2本指のシンプルな構成。誰でも容易に遠隔からロボットを直接操作し、作業手順や力加減などの動きを記憶させる工夫がなされている。導入想定先としては、食品や医薬品製造工場などだという。
システムのコントロールには、統合制御ソフトウェアであるTwinCATを組み合わせたベッコフオートメーション社の超小型産業用PC「C6015」を採用し、省スペース化を図る。操作データ(作業手順、作業時の実映像、力加減など)の保存・蓄積により、将来的にAIを採用した作業との連動を図ることも想定している。
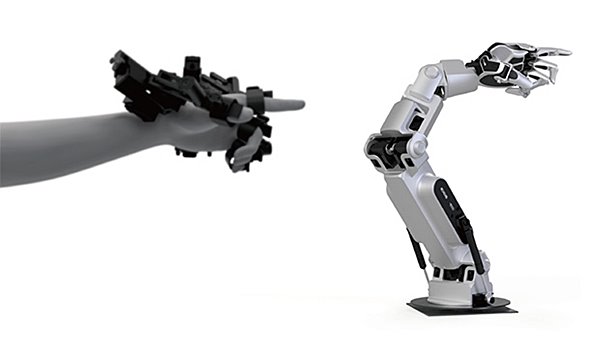 イクシーと共同開発した力触覚伝達技術を利用した遠隔操作システム 出典:大成建設
イクシーと共同開発した力触覚伝達技術を利用した遠隔操作システム 出典:大成建設操作側では、デンソーウェーブ社の小型6軸で人と協働するロボット「COBOTTA」をマスター側に導入。ロボットアーム先端には、操作者が指や手に容易に装着できるイクシー社のグリップ型力触覚提示デバイス「EXOS Gripper」を導入する。
遠隔ロボットは、繊細な動きにも追従可能なデンソーウェーブの垂直多関節ロボット「VSシリーズ」。統合制御ソフトウェアは、生産現場での遠隔操作制御用通信に相当するネットワークに、オープンなベッコフオートメーション社の「EtherCAT」を用いる。
システム導入により、製造エリアでの省人化を図り、近い将来IoT、AIをコアとしたスマート化と合わせ、生産性向上につなげ、無人化やロボット本体の省エネ化による空調・照明などの運用コストを低減する。
このシステムを使えば、場所や時間を問わずに24時間で作業が可能なため、海外からでも日本との時差を生かして、現地労働力が活用できるなどの新しいワークスタイルを創出できるとしている。
関連記事
 人と機械が協働しやすく、「からくり」ロボットハンドを新開発
人と機械が協働しやすく、「からくり」ロボットハンドを新開発
NEDOとダブル技研、都立産業技術高専は、単純な制御だけで多様な形状のワークを安定して把持できるロボットハンド新機構の開発に成功したと発表した。複雑な電子制御への依存を最小限に抑え、高性能なロボットハンドが実現できる。 発電機の点検作業を超短縮、三菱電機が薄型ロボット
発電機の点検作業を超短縮、三菱電機が薄型ロボット
三菱電機は電力会社などが所有する発電機を、短い期間で高精度に点検できる薄型点検ロボットを開発したと発表した。厚みは19.9mmで、発電機の固定子と回転子の間に侵入し、打診検査と撮影を実行できる。 2体のロボットが、会話しながら天井石こうボードを貼る
2体のロボットが、会話しながら天井石こうボードを貼る
戸建て住宅も含めた建設現場で、天井の石こうボードを貼る2体のロボットが開発された。AIでお互いにコミュニケーションを取り、作業位置や施工箇所を共有して効率的な貼り付け工事を行う。 斜張橋の調査ロボットにカメラ3台追加などの新機能、西松建設
斜張橋の調査ロボットにカメラ3台追加などの新機能、西松建設
西松建設は佐賀大学の伊藤幸広教授と共同開発した斜張橋の斜材保護管の自走式調査ロボット「コロコロチェッカー」に新たな機能を搭載した。新機能は、進行方向の前面にフルハイビジョンカメラを3台装備し、これまで調査ができなかった主塔接続部の状況を確認できるようにした。
Copyright © ITmedia, Inc. All Rights Reserved.
人気記事トップ10
- クボタが“原点回帰”のオレンジ色に一新 8トン中型建機を日本市場に投入
- ボルボ建機のフラグシップ機が日本上陸 都市部の狭小地でも36トン級のパワー発揮
- 建設現場で3Dデータ活用が進まない理由と突破口【ローカスブルー解説】
- 無電源/無通信でもドローンポート活用 太陽光パネル/蓄電池/Starlinkをセット提供
- 電動建機ユーザーへ移動給電、コマツらが28年度までに事業化へ
- 生コン工場のモルタルをミキサー車で直送、3D建設プリンタの施工を実証
- 「楽楽精算」に5つのAI機能実装、2030年までに完全自動化目指す
- 遠隔施工ロボットを国内トンネル工事に適用、西松建設の現場に適用 ガデリウス
- 空に「道」をつくる! ブルーイノベーションが台湾Aeroprobingと提携
- 日立建機らのリアルタイムデジタルツインを用いた遠隔施工に参画、ユニキャスト





![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。