トンネル工事の切羽観察作業を自動化、戸田建設が自律飛行ドローン活用の新システム:i-Construction 2.0
戸田建設は、自律飛行ドローンを活用した切羽自動監視システムを開発し、施工中のトンネルでの技術検証に成功した。今後は自律飛行時のフェイルセーフ機能や精度の向上を図りながら試験運用を進め、2025年度中の本格運用開始を目指す。
戸田建設は2025年1月29日、自律飛行ドローンを活用した切羽自動監視システムを開発したと発表した。施工中のトンネルでの技術検証に成功し、トンネル工事における切羽観察作業の自動化を実現した。今後は坑内での自律飛行時のフェイルセーフ機能の向上を図ると共に、精度向上や試験運用を進め、2025年度中の本格運用開始を目指す。

新システムは、屋内特化型のドローン自律飛行システムを開発するSpiralと、DXサービス事業を展開するGreenBeeの協力を得て開発した。GNSS利用ができない環境でも自律飛行可能な「非SLAM型自律飛行ドローン」に、切羽検知機能とAIによる切羽評価機能を付加し、切羽観察の一連の作業を自動化する。
自動化システムは、現場技術員が直観的に操作できる「切羽検知アプリ(MFA-Tracker切羽モード)」と、メンテナンスフリーの充電ポートから成る。
切羽検知アプリは、事前に登録した飛行計画からドローンに適切な飛行を指示する「飛行計画モード」、ドローンのリアルタイムな飛行ルートやストリーミング動画を確認できる「ライブビューモード」、対象の切羽測点を入力するだけで適正な位置から切羽写真を自動撮影する「切羽検知モード」、撮影した写真からAIが評価に適切な写真を自動検出する「画像検出モード」で構成。これにより、重機類を避けて飛行する「障害物回避機能」や、掘削の進行に伴い日々移動する切羽位置を認識するための「切羽の自動検知機能」を持たせた自律飛行が可能になった。

充電ポートは、待機や充電中に自動的に防塵(じん)/防水/冷房搭載のキャノピー(ドローン格納ボックス)が閉まり、ドローンの状態を保護する。着陸時にはドローンの位置を適正にするポジションパッド、脚を挟み充電するドッキングパッドを組み合わせて自動位置調整と自動充電を行う。
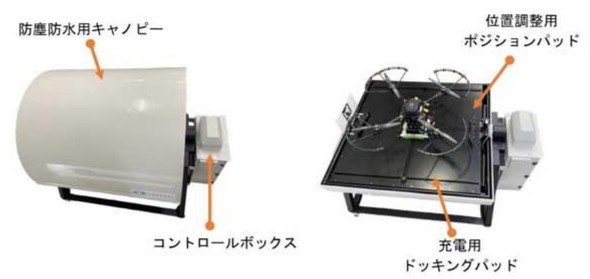 ドローンポート 出典:戸田建設プレスリリース
ドローンポート 出典:戸田建設プレスリリース撮影から切羽の評価までの作業時間を合計17分に短縮
施工中の山岳トンネルでの技術検証では、ドローンの自律飛行システムを使用し、飛行安定性と画像取得、AIによる切羽評価まで含めた一連のシステムについて効果を検証した。その結果、充電ポートからの自律離陸、トンネル坑内で撮影をしながらの障害物回避、適切な位置での切羽撮影、充電ポートへの帰還まで、完全自動運用ができることを確認した。
さらに、AIによる数百枚の切羽写真からの適切な写真選定と評価ができることも実証。従来2時間程度を有していた撮影から切羽の評価(帳票作成)までの作業時間を、合計17分(写真取得6分、データアップロード1分、切羽AI評価システムによる評価と帳票作成10分)に短縮することに成功した。
関連記事
 木造/木質化:中高層木造建築構法「P&UA構法」による11階建て事務所モデルプランで構造評定取得
木造/木質化:中高層木造建築構法「P&UA構法」による11階建て事務所モデルプランで構造評定取得
東急建設、戸田建設、西松建設などが参画する「P&UA構法共同技術開発グループ」は、P&UA構法を用いた二方向ラーメン架構に耐力壁を併用した11階建て事務所のモデルプランで、日本建築センターの構造評定を取得した。 新工法:RC構造物を通電加熱で脆弱化、解体時間を4割削減 戸田建設が「マスホット工法」を試験適用
新工法:RC構造物を通電加熱で脆弱化、解体時間を4割削減 戸田建設が「マスホット工法」を試験適用
戸田建設とNF千代田エレクトロニクスは、解体前のRC構造物を通電加熱により脆弱化させる技術「マスホット工法」を、道路橋の床版取替工事に試験適用した。 プロジェクト:半導体集積地の熊本県菊陽町で、70haの大型都市開発 三菱商事と三井不がパートナーに選定
プロジェクト:半導体集積地の熊本県菊陽町で、70haの大型都市開発 三菱商事と三井不がパートナーに選定
熊本県菊陽町が公募した70haに及ぶ「原水」駅周辺の土地区画整理事業で、三菱商事と三井不動産を大法企業とする2つのコンソーシアムが、街の将来ビジョンの検討パートナーに選ばれた。TSMCなどの半導体企業が進出する人口増加や経済発展に対応する街の将来像を提案する。 通信環境:エレベーター内を含む高層ビル全体でWi-Fi電波が途切れない環境を構築、戸田建設の無線LAN環境構築技術で
通信環境:エレベーター内を含む高層ビル全体でWi-Fi電波が途切れない環境を構築、戸田建設の無線LAN環境構築技術で
戸田建設は、自社の無線LAN環境構築技術「ウェーブガイドLANシステム」を11階建ての高層ビルに適用し、エレベーター内も含む建物全体でWi-Fi電波が途切れない環境を構築し、その有効性を確認した。 ZEB:本設太陽光パネルを仮設現場事務所で先行利用、『ZEB』認証を取得 戸田建設と村田製作所
ZEB:本設太陽光パネルを仮設現場事務所で先行利用、『ZEB』認証を取得 戸田建設と村田製作所
戸田建設と村田製作所は、福井村田製作所の新研究開発センター建設工事において、本設で設置する太陽光パネルを仮設現場事務所で先行利用し、仮設事務所の「ZEB」認証を取得した。 全建協:全建協会長「建設業全体が足並みをそろえ社会課題解決を」 技術研究発表会、最優秀賞に錢高組など
全建協:全建協会長「建設業全体が足並みをそろえ社会課題解決を」 技術研究発表会、最優秀賞に錢高組など
全国建設業協会は、都内で2024年度の技術研究発表会を開催した。高度技術部門の最優秀賞に錢高組 技術本部 技術研究所 主席研究員 角田晋相氏が発表した「換気設備の自動制御による電力削減事例」が、創意工夫部門の最優秀賞に山辰組 専務 馬渕剛氏が発表した「草の酸素供給型高速焼却装置『モヤッシー』」が選出された。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
人気記事トップ10
- ドローン墜落場所を10km先から特定 山岳救助の知見を応用したGPS要らずの探索システム
- 清水建設が人手不足を「フィジカルAI」で打破 「Torch Tower」でロボット巡回
- ホンダ、高出力パワユニ「eGX」を世界初公開 交換式バッテリー活用で建設現場のGX支援
- 日立建機が2027年に「ランドクロス」へ ICT施工や電動化、自動化で“機械の先”提案
- コマツの建機メンテに、SORABITOの音声AIアシスタント導入
- インフラ点検から物流までをフルカバー “水空合体”含む全モデルを展示したプロドローン
- 0.04mmのひびを暴く、アイ・ロボティクスのドローン技術が国交省カタログに掲載
- 維持管理BIMと不動産管理クラウドが連携、戸田建設新本社ビルで運用開始
- 安田建設が“簡単後付け”のドローン装備提案、汎用機が点検専用に早変わり
- フィジカルAI×デジタルツインで橋梁塗装自動化へ、北都鉄工とTengun-labelが共同研究





![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。