柍恖斃憲幵偺乬帺棩憱峴乭偱帒婡嵽偺帺摦斃憲傪幚尰丄屗揷寶愝
廬棃丄寶愝尰応偺帒婡嵽斃憲偼丄崗乆偲曄壔偡傞尰応忬嫷偵懳墳偟偒傟側偄偙偲偐傜帺摦斃憲偼崲擄偲偝傟丄尰嵼傕僴儞僪僷儗僢僩側偳傪巊偭偨恖椡斃憲偑堦斒揑偩偭偨丅屗揷寶愝偑崱夞敪昞偟偨乽悈暯帺摦斃憲僔僗僥儉乿偼丄帺棩憱峴偺柍恖斃憲幵偵傛傞廮擃側帺摦斃憲偵壛偊丄娗棟PC偐傜偺斃憲儖乕僩偺愝掕傕娙慺壔偟丄斃憲嶌嬈偺戝暆側徣椡壔傪幚尰偟偨丅
丂屗揷寶愝偼2018擭8寧3擔丄捠徧AGV偲屇偽傟傞柍恖斃憲幵偺妶梡偵傛傝丄寶愝尰応偺帒婡嵽斃憲傪徣椡壔偡傞乽悈暯帺摦斃憲僔僗僥儉乿傪奐敪偟偨偲敪昞偟偨丅彨棃揑偵偼丄岺帠梡僄儗儀乕僞乕偺乽悅捈斃憲乿傕帺摦斃憲偟堦尦壔偡傞尒捠偟偩丅
丂摨僔僗僥儉偼丄柍慄捠怣偵傛傞帺摦擣幆媄弍丒RFID僞僌傪帒婡嵽偵庢傝晅偗丄岺帠梡僄儗儀乕僞乕晅嬤偺僎乕僩傾儞僥僫偵愙嬤偡傞偲丄娗棟PC偑RFID僞僌偐傜僒僀僘側偳偺帒婡嵽忣曬傪帺摦庢摼偟丄斃憲愭偺僗僩僢僋儎乕僪傪敾暿丅偙偺屻丄娗棟PC偑斃憲愭偺忣曬傪AGV偵憲怣偡傟偽丄偦偺忣曬偵婎偯偒AGV偑強掕偺応強偵抲偐傟偨帒婡嵽傪帺摦斃憲偡傞丅

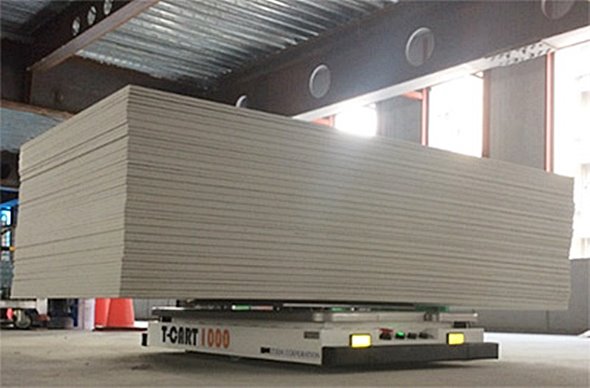
丂摨僔僗僥儉偺AGV偼乽T-CART 1000乿偲偄偆柤徧偱丄強掕偺応強偵偁傞帒婡嵽偺愱梡戜幵壓偵愽傝崬傫偱偗傫堷偡傞丅乽T-CART 1000乿偼應堟僙儞僒乕傪梡偄偰丄帺屓埵抲悇掕偲廃曈娐嫬偺抧恾嶌惉傪摨帪偵峴偆SLAM媄弍傪摫擖偟丄AGV偑帺恎偺埵抲傪悇掕偟側偑傜帺棩憱峴偡傞偙偲傪幚尰偟偰偄傞丅偙傟偵傛傝丄廬棃偺AGV偱巊傢傟傞帴婥僥乕僾傗儅乕僇乕側偳偺僈僀僪傪晄梫偲偟偨丅傑偨丄愱梡戜幵偺偗傫堷偩偗偱側偔丄帒婡嵽傪捈愙愊嵹偟偰斃憲偡傞偙偲傕壜擻偱丄帒婡嵽偺庬暿偵墳偠偰斃憲曽朄傪慖傋傞偺傕億僀儞僩丅愱梡戜幵暪梡丄捈愙愊嵹偄偢傟偺応崌傕堦搙偵1000kg乮僉儘乯傑偱斃憲偱偒傞丅

 嵍偐傜帺棩憱峴偡傞AGV乽T-CART 1000乿丄愱梡戜幵暪梡偱偺帒婡嵽斃憲丂弌揟丗屗揷寶愝
嵍偐傜帺棩憱峴偡傞AGV乽T-CART 1000乿丄愱梡戜幵暪梡偱偺帒婡嵽斃憲丂弌揟丗屗揷寶愝丂斃憲儖乕僩偼丄娗棟PC偱梕堈偵愝掕壜擻丅夋柺偵昞帵偝傟偨暯柺恾偵宱楬忋偺庡梫抧揰偵偁偨傞偗傫堷奐巒埵抲丄戅旔埵抲丄廩揹埵抲丄斃憲愭側偳傪擖椡偡傞丅偦偺抧揰娫傪偮側偖偩偗偱儖乕僩傪愝掕偱偒傞偙偲偐傜丄尰応娐嫬偺曄壔偵崌傢偣偨儖乕僩偺曄峏側偳傕廮擃偵懳墳壜擻偩丅
丂寶愝尰応偱偼丄尰嵼傕僴儞僪僷儗僢僩側偳偱恖椡偵傛傞帒婡嵽斃憲偑堦斒揑丅偦偺攚宨偲偟偰丄岺掱偑恑傓偵偮傟偰曄壔偡傞尰応忬嫷偵崌傢偣丄斚嶨側斃憲儖乕僩偺曄峏傗忈奞暔偺夞旔側偳傪偦偺搒搙曄峏偡傞昁梫偑偁傝丄帴婥僥乕僾傗儅乕僇乕偺僈僀僪偵傛傞屌掕儖乕僩宍幃偺AGV偱偼岠棪揑側塣梡偑擄偟偐偭偨丅
丂崱夞奐敪偝傟偨僔僗僥儉偺嵦梡偵傛傝丄廬棃偼僴儞僪僷儗僢僩傗僉儍僗僩戜幵傪巊偭偰3乣5恖偱峴偭偰偄偨斃憲嶌嬈偺AGV戙峴傪幚尰丅僆儁儗乕僞乕偵傛傞弶婜愝掕屻偼柍恖偱塣梡偱偒傞傎偐丄暋悢戜偺AGV傪楢摦偝偣偨帺摦惂屼傕壜擻偲側傝丄斃憲岠棪偺岦忋偵戝偒偔峷專偡傞丅
 捈愙愊嵹偵傛傞帒婡嵽斃憲忬嫷丂弌揟丗屗揷寶愝
捈愙愊嵹偵傛傞帒婡嵽斃憲忬嫷丂弌揟丗屗揷寶愝丂屗揷寶愝偱偼丄偙傟傑偱偵娭搶寳偵偍偗傞暋悢偺寶愝尰応偱摨僔僗僥儉傪専徹偟丄斃憲嶌嬈偺徣椡壔傪妋擣丅崱屻偼暆峀偔尰応偵揥奐偟偰偄偔偲偲傕偵丄岺帠梡僄儗儀乕僞乕偲偺楢摦傕帇栰偵擖傟傞丅偙傟偑幚尰偡傟偽丄悈暯丒悅捈斃憲偺堦尦揑側帺摦塣梡傕幚尰偟丄偝傜側傞尰応偺斃憲嶌嬈偺徣椡壔傪恾傟傞偲偄偆丅
娭楢婰帠
 愊悈僴僂僗偑奐敪偟偨乽夛榖偡傞巤岺儘儃僢僩乿偲乽傾僔僗僩僗乕僣乿偺幚婡僨儌
愊悈僴僂僗偑奐敪偟偨乽夛榖偡傞巤岺儘儃僢僩乿偲乽傾僔僗僩僗乕僣乿偺幚婡僨儌
愊悈僴僂僗偼丄廧戭巤岺尰応偱偺嶌嬈晧壸寉尭傪栚揑偵丄乽揤堜愇偙偆儃乕僪巤岺儘儃僢僩乿傪僥儉僓僢僋偲丄乽忋岦偒嶌嬈梡傾僔僗僩僗乕僣乿傪僟僀僪乕偲丄偦傟偧傟嫟摨奐敪偟偨丅儘儃僢僩偼丄僛僱僐儞側偳偱摫擖偝傟偰偄傞嶻嬈梡儘儃僢僩偲堎側傝丄AI傪搵嵹偟丄屳偄偵捠怣偱僐儈儏僯働乕僔儑儞傪庢傝側偑傜巤岺偡傞捒偟偄僞僀僾丅傾僔僗僩僗乕僣偼丄嶌嬈幰偺榬傪僒億乕僩偟丄挿帪娫偺恏偄忋岦偒嶌嬈傪妝偵偡傞丅 5擭屻偺寶愝尰応偼IoT偲儘儃僢僩偱偙偆曄傢傞丄屗揷寶愝偑媄弍價僕儑儞
5擭屻偺寶愝尰応偼IoT偲儘儃僢僩偱偙偆曄傢傞丄屗揷寶愝偑媄弍價僕儑儞
屗揷寶愝偑2023擭偵幚尰傪栚巜偡巤岺媄弍偺價僕儑儞傪敪昞丅IoT傗儘儃僢僩傗儘儃僢僩側偳傪僼儖妶梡偟丄旘桇揑側惗嶻惈岦忋傪栚巜偡偲偄偆丅 惔悈寶愝丒屗揷寶愝偑娔廋偟偨巰偺婋尟傪姶偠傞VR尋廋丅奐敪偟偨愊栘惢嶌偵暦偔
惔悈寶愝丒屗揷寶愝偑娔廋偟偨巰偺婋尟傪姶偠傞VR尋廋丅奐敪偟偨愊栘惢嶌偵暦偔
愊栘惢嶌偼2018擭6寧7擔丄VR乮僶乕僠儍儖儕傾儕僥傿乕乯媄弍傪妶梡偟偨孭楙丄尋廋僐儞僥儞僣乽埨慡懱姶VR僩儗乕僯儞僌乿偺寶愝尰応僔儕乕僘傪敪攧偟偨丅VR尋廋偲偼偳偆偄偆傕偺偐丄側偤VR側偺偐丄愊栘惢嶌僙乕儖僗僨傿價僕儑儞 僔僯傾僨傿儗僋僞乕偺娭崻寬懢巵偵暦偄偨丅 價儖儊儞儘儃僢僩偺晛媦慻怐憂棫丄弶戙夛挿婇嬈偵傾僋僥傿僆
價儖儊儞儘儃僢僩偺晛媦慻怐憂棫丄弶戙夛挿婇嬈偵傾僋僥傿僆
儘儃僢僩儊乕僇乕側偳14幮偱峔惉偝傟偨擔杮價儖儊儞儘儃僢僩嫤媍夛偑2018擭7寧5擔丄敪懌偟偨丅弶戙夛挿婇嬈偵偼傾僋僥傿僆偑廇偒丄崱屻偼價儖儊儞僥僫儞僗暘栰偱儘儃僢僩偺晛媦偲摫擖偺奼戝傪恾偭偰偄偔丅
Copyright © ITmedia, Inc. All Rights Reserved.
恖婥婰帠僩僢僾10
- 僪儘乕儞捘棊応強傪10km愭偐傜摿掕丂嶳妜媬彆偺抦尒傪墳梡偟偨GPS梫傜偢偺扵嶕僔僗僥儉
- 惔悈寶愝偑恖庤晄懌傪乽僼傿僕僇儖AI乿偱懪攋丂乽Torch Tower乿偱儘儃僢僩弰夞
- 僞僟僲偑70僩儞僋儗乕儞傪揹摦壔丂GX崅強嶌嬈幵傗VR媄擻嫵堢傕揥帵
- 擔棫寶婡偑2027擭偵乽儔儞僪僋儘僗乿傊丂ICT巤岺傗揹摦壔丄帺摦壔偱乬婡夿偺愭乭採埬
- 埨揷寶愝偑乬娙扨屻晅偗乭偺僪儘乕儞憰旛採埬丄斈梡婡偑揰専愱梡偵憗曄傢傝
- 僐儅僣偺寶婡儊儞僥偵丄SORABITO偺壒惡AI傾僔僗僞儞僩摫擖
- 僀儞僼儔揰専偐傜暔棳傑偱傪僼儖僇僶乕丂乬悈嬻崌懱乭娷傓慡儌僨儖傪揥帵偟偨僾儘僪儘乕儞
- 0.04mm偺傂傃傪朶偔丄傾僀丒儘儃僥傿僋僗偺僪儘乕儞媄弍偑崙岎徣僇僞儘僌偵宖嵹
- Revit偺扨弮嶌嬈傪AI偑尐戙傢傝丂Arent偺BIM梡乽AI僄乕僕僃儞僩乿偑戝婯柾嶞怴
- 2D恾柺傗揰孮偐傜BIM乛CIM儌僨儖傪帺摦惗惉丂DataLabs偑乽Framy乿傪斺業





![]() ITmedia偼傾僀僥傿儊僨傿傾姅幃夛幮偺搊榐彜昗偱偡丅
ITmedia偼傾僀僥傿儊僨傿傾姅幃夛幮偺搊榐彜昗偱偡丅