半自律で施工可能に、大成建設の床仕上げロボットが進化:情報化施工
大成建設は、2016年に同社が開発したコンクリート床仕上げロボット「T-iROBO Slab Finisher」の機能を拡張し、半自律制御操作を可能とするシステムを開発したと発表した。ロボットの常時操作が不要になり、オペレーター(土間工)の作業負荷を低減できるという。
コンクリート床仕上げをロボットが半自律運転で
大成建設は2017年10月、同社が開発したコンクリート床仕上げロボット「T-iROBO Slab Finisher」の機能を拡張し、筑波大学と共同で半自律制御操作を可能とするシステムを開発したと発表した。以前はオペレーター(土間工)による遠隔からの常時操作を必要としていたが、今回開発した半自律制御システムにより、施工中の自動運転が可能になる。

T-iROBO Slab Finisherは、2016年に大成建設が開発したコンクリート床仕上げ作業を行うロボット。多数の土間工を必要としていた手作業による床仕上げ作業の現場を、ロボットによって土間工の作業負荷軽減、作業の高効率化が達成できたという。
また、土間工が騎乗、操作するタイプの土間仕上げ用機械と比較してロボットは小型軽量なため、運搬や重量の問題で土間仕上げ用機械が適用できない現場でも、ロボットによる施工が可能になったとする。

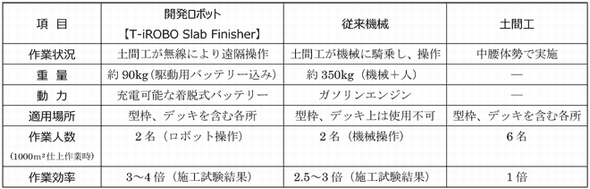 T-iROBO Slab Finisherとその他施工法の比較 出典:大成建設
T-iROBO Slab Finisherとその他施工法の比較 出典:大成建設しかし、これまでの場合ロボット本体は、オペレーターの役割を担う土間工が常時コントローラーで操作を行う必要があった。今回開発した半自律制御システムは、こうした操作を半自動化することができ、より効率的な運用が可能になるという。
半自律制御システムを利用した操作方法は2種類ある。1つが、事前に走行範囲を指定する方式だ。事前にオペレーターがコントローラーでロボットを走行させ、施工範囲を指定する。すると、範囲の指定終了後にロボットの内蔵コンピュータが指定範囲内における走行ルートを解析し、そのルート上を自動で繰り返し走行して床仕上げ作業を行うことができる。施工範囲に障害物がほとんどない、単純な平面形状の工場や、オフィスなどでの床仕上げ作業に適した操作方法という。
もう1つが、走行ルートを指定する方式だ。こちらは初めにオペレーターがコントローラーでロボットを操作し、走行ルートを決める。すると、2回目以降は、ロボットがそのルートを繰り返したどりながら自動走行して作業を行う仕組みだ。施工範囲内の障害物を回避しなければならない複雑な平面形状の建物地下部や、倉庫などでの床仕上げ作業に適した方法という。

大成建設は、本システムが搭載されたロボットを床仕上げ作業を実施する現場に広く展開し、作業の省力化、労働環境の改善を図っていくとしている。
関連記事
 10人分の仕事を1台で実現、鉄筋結束作業の自動化ロボット
10人分の仕事を1台で実現、鉄筋結束作業の自動化ロボット
千葉工業大学と大成建設は、鉄筋工事の鉄筋結束作業を自動化するロボットを開発した。身体的負担が大きい鉄筋結束作業の省力、効率化により、鉄筋工事の生産性向上を狙う。 VRで重機を遠隔操作、大成建設が新システム
VRで重機を遠隔操作、大成建設が新システム
大成建設はヘッドマウントディスプレイ(HMD)を用いて、遠隔地から実際に搭乗している感覚で重機を操縦できるシステムを開発した。災害現場などの二次災害の危険がある場所での作業などに活用できるという。 建設現場に「お掃除ロボット」、ヒト並みの作業効率で省人化に
建設現場に「お掃除ロボット」、ヒト並みの作業効率で省人化に
大成建設は建設現場において自動で清掃作業を行うことができる自律型清掃ロボット開発したと発表した。既に現場への導入を開始しており、清掃作業の省人化が可能になるという。 柱鉄骨の溶接をロボットで自動化、2017年度に本格導入
柱鉄骨の溶接をロボットで自動化、2017年度に本格導入
人手不足が懸念され、省人化や効率化が課題となっている建設現場。その解決方法の1つとして注目されているのがロボットの活用だ。大成建設は小型のロボットを使った柱鉄骨の現場溶接自動化工法を開発した。複雑な形状の部位でもロボットが形状変化を判断して連続して溶接できるロボットで、大幅な効率化が図れるという。 人とロボットの協業を実現、清水建設が工事を70%省人化へ
人とロボットの協業を実現、清水建設が工事を70%省人化へ
清水建設は、複数の自律型ロボットと人が協調しながら建設工事を進めるシステム「シミズ スマート サイト」を構築し、2018年早々に関西での高層ビル案件に適用する。ロボットを適用する工種において70%以上の省人化を目指すという。 シロアリ対策にロボット活用、積水ハウスが実戦投入
シロアリ対策にロボット活用、積水ハウスが実戦投入
積水ハウスは賃貸就業住宅のシロアリ対策にロボットを導入する。床下に薬剤を散布する処理を、遠隔からロボットで行えるようにする。立ち会いなど住民の負担も減る他、従来の作業者が床下に入る方法よりコストを1割削減できるメリットもあるという。
Copyright © ITmedia, Inc. All Rights Reserved.
人気記事トップ10
- クボタが“原点回帰”のオレンジ色に一新 8トン中型建機を日本市場に投入
- ボルボ建機のフラグシップ機が日本上陸 都市部の狭小地でも36トン級のパワー発揮
- 建設現場で3Dデータ活用が進まない理由と突破口【ローカスブルー解説】
- 無電源/無通信でもドローンポート活用 太陽光パネル/蓄電池/Starlinkをセット提供
- 電動建機ユーザーへ移動給電、コマツらが28年度までに事業化へ
- 生コン工場のモルタルをミキサー車で直送、3D建設プリンタの施工を実証
- 「楽楽精算」に5つのAI機能実装、2030年までに完全自動化目指す
- 遠隔施工ロボットを国内トンネル工事に適用、西松建設の現場に適用 ガデリウス
- 空に「道」をつくる! ブルーイノベーションが台湾Aeroprobingと提携
- 日立建機らのリアルタイムデジタルツインを用いた遠隔施工に参画、ユニキャスト





![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。