戸田建設とSpiral、非SLAM型自律飛行ドローンでの3次元座標取得検証:ドローン
戸田建設とSpiralは、非SLAM型自律飛行ドローンを用いた3次元座標取得の検証を開始した。SLAM技術を用いずに飛行を制御するため、特徴点が少ない山岳トンネルなどの場所においても高速かつ長距離の飛行が可能となっている。
戸田建設とSpiralは2023年3月16日、非SLAM型自律飛行ドローンを用いた3次元座標取得の検証を開始したと発表した。
同検証においては、自律飛行の制御機構にSpiralの「MarkFlexAir(マークフレックスエアー)」を採用した。同システムでは、ドローンが飛行情報を記憶した専用マーカーを読み取ることで、自律飛行が可能となる。
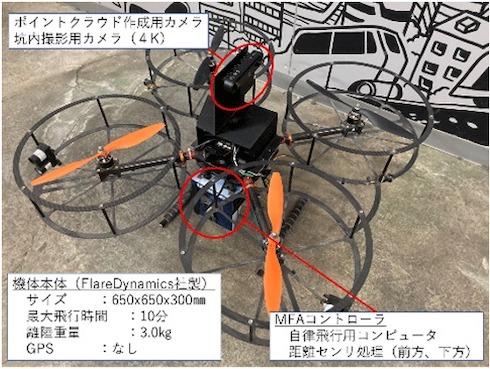 使用機器 出典:戸田建設プレスリリース
使用機器 出典:戸田建設プレスリリース飛行中は、接触防止センサーや距離計を用いて障害物を回避する。専用のアプリケーションを用いることで、Wi-Fiを通じて内蔵4Kカメラ(30フレーム/秒)の画像情報を取得できる。
 検証状況 出典:戸田建設プレスリリース
検証状況 出典:戸田建設プレスリリース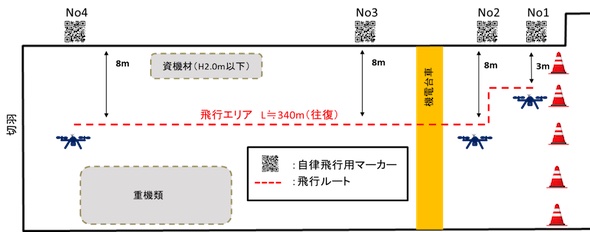 飛行経路およびマーカー設置平面図 出典:戸田建設プレスリリース
飛行経路およびマーカー設置平面図 出典:戸田建設プレスリリースまた、SLAM技術を用いずに飛行を制御するため、特徴点が少ない山岳トンネルなどの場所においても高速かつ長距離の飛行が可能となっている。
内蔵のステレオカメラによる撮影画像を用いて、Visual SLAMおよびSfM(Structure from Motion)によってポイントクラウド(点群座標)を作成。ステレオカメラを採用したことで、ポイントクラウド上での距離の算出が可能となっている。

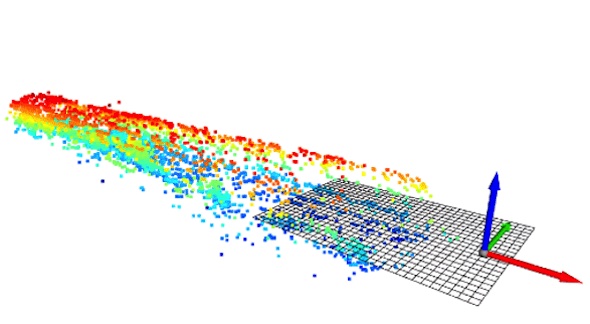 Visual SLAMによる処理結果 出典:戸田建設プレスリリース
Visual SLAMによる処理結果 出典:戸田建設プレスリリース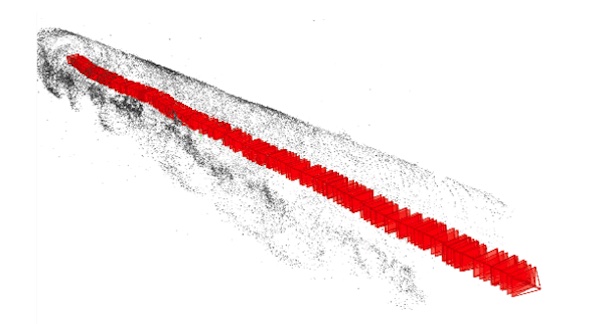 SfMによる処理結果 出典:戸田建設プレスリリース
SfMによる処理結果 出典:戸田建設プレスリリース標定点などにより補正しない場合で、飛行距離に対する誤差は3%程度となった。
今後は、自律飛行用のマーカー情報に座標を付与するほか、ポイントクラウド作成用のアルゴリズムを改良することで、ドローン座標や各設備の座標取得の高精度化を図る。
また、接触防止機能を改善し、重機類が輻輳(ふくそう)する環境下での自律飛行も可能とする。さらに、3次元座標情報とAI(人工知能)を連携させることで、生産性を向上させる技術の開発も進める。
関連記事
 自律飛行ドローンと“3次元形状”を教師データとするAIで、トンネル発破の「良否判定」を自動化
自律飛行ドローンと“3次元形状”を教師データとするAIで、トンネル発破の「良否判定」を自動化
戸田建設とRistは、熟練トンネル技能者が行っていた次に行う発破のための“良否判定”をドローンとAIで自動化する「Blast Eye/AI(ブラスト・アイ)」を開発した。独自開発のAIモデルは、一般的な2次元画像を対象としたものでなく、形状の判定という3次元領域を対象としている。 BIMモデルから作成したMRで競技施設の鉄骨建方精度を確認、戸田建設
BIMモデルから作成したMRで競技施設の鉄骨建方精度を確認、戸田建設
戸田建設は、佐賀県佐賀市で新築工事を進める競技施設「SAGAサンライズパークアリーナ」で、DataMesh製の専用アプリやタブレットなどを活用し、BIMモデルから作成した鉄骨建方のMRを施工中の建物に投映し、鉄骨建方の精度確認を行った。 戸田建設の医療施設向け「感染症対策ユニット」に、“折りたたみ型”が追加
戸田建設の医療施設向け「感染症対策ユニット」に、“折りたたみ型”が追加
戸田建設は、新型コロナ対策で、医療施設の感染区画を工事不要で容易に変更できる「感染症対策ユニット」に、折りたたみ型を追加した。 戸田建設がトータルコスト削減につながる“耐震ブレース”を本格適用
戸田建設がトータルコスト削減につながる“耐震ブレース”を本格適用
戸田建設は、自社開発した高性能かつ経済的な耐震ブレース「戸田式座屈拘束ブレース(TO-BRB)」を愛知県で建設中の生産施設で初適用した。成田PC工場で製造体制を既に確立しており、本格的な現場への適用段階に移行したことになる。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
人気記事トップ10
- クボタが“原点回帰”のオレンジ色に一新 8トン中型建機を日本市場に投入
- ボルボ建機のフラグシップ機が日本上陸 都市部の狭小地でも36トン級のパワー発揮
- 建設現場で3Dデータ活用が進まない理由と突破口【ローカスブルー解説】
- 電動建機ユーザーへ移動給電、コマツらが28年度までに事業化へ
- 無電源/無通信でもドローンポート活用 太陽光パネル/蓄電池/Starlinkをセット提供
- 生コン工場のモルタルをミキサー車で直送、3D建設プリンタの施工を実証
- 「楽楽精算」に5つのAI機能実装、2030年までに完全自動化目指す
- 遠隔施工ロボットを国内トンネル工事に適用、西松建設の現場に適用 ガデリウス
- 空に「道」をつくる! ブルーイノベーションが台湾Aeroprobingと提携
- 日立建機らのリアルタイムデジタルツインを用いた遠隔施工に参画、ユニキャスト





![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。