ドローンで空から地中探査、災害時の人命救助を迅速化:情報化施工
NEDOプロジェクトでエンルート、産業技術総合研究所、日立製作所、八千代エンジニヤリングは、ドローンを利用して土砂災害時に地中に埋没した車両を空中から探査するシステムを開発した。人の立ち入りが困難な災害現場での救出活動の迅速化に貢献する技術として、実用化を目指す。
エンルート、産業技術総合研究所(産総研)、日立製作所、八千代エンジニヤリングは、NEDOプロジェクトの一環として、ドローンを利用して土砂災害時に地中に埋没した車両を空中から探査できるシステムを開発した。ヘリコプターより狭いエリアにアクセスでき、低空飛行でより細かな探査が行えるという。災害現場での救出活動の迅速化に貢献する技術として実用化を目指す方針だ。
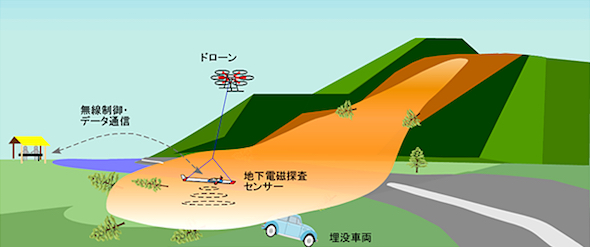 開発したシステムによる土砂災害現場での埋没車両の探査イメージ 出典:NEDO
開発したシステムによる土砂災害現場での埋没車両の探査イメージ 出典:NEDO2016年の熊本地震による南阿蘇村での土砂災害や、2004年の新潟県中越地震に伴って発生した長岡市での土砂災害では、人命救助のために土砂に埋没した車両の迅速な探査が求められた。しかし二次災害への懸念もあり、人の立ち入りが難しい状況での車両探査作業は困難だった。一方、近年ゲリラ豪雨などの気象に起因する土砂災害は増加傾向にあり、遠隔から効率良く埋没車両を探査できる技術が求められている。そこで4者は、地面に触れずに地下の様子を調査する物理探査法の一種である電磁探査法を用い、ドローンで上空から地中調査が行える技術の開発に取り組んだ。
開発したシステムはドローンに専用のセンサーをつり下げ、現場の上空を飛行しながら埋没車両の位置を特定する仕組みだ。センサー部は長さ1.6mの地下電磁探査センサー、位置情報収集用のGPS信号受信器、センサーの制御と計測データをモニタリングするための無線通信装置、地下電磁探査センサーの対地高度をモニタリングする超音波距離センサーで構成されている。
システムの性能を検証するため、車両を埋設した実験サイトをもつ日本建設機械施工協会施工技術総合研究所(施工総研)と共同で検証実験を実施。軽自動車2台を地下1.5m(浅部)と3.0m(深部)に埋設した実験サイトで、開発したドローンシステムを航行速度約2m/s、センサー部の対地高度を約1mで航行させ、広域探査と精密探査の2つの手法を検証した。
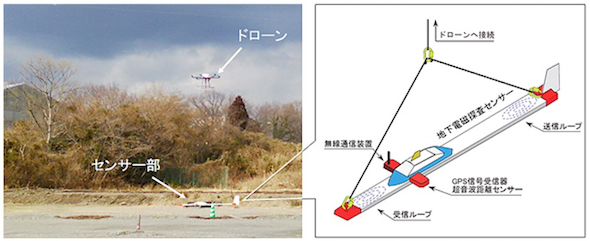 ドローンつり下げ型電磁探査システムによる航行計測の様子(左)とセンサー部(右) 出典:NEDO
ドローンつり下げ型電磁探査システムによる航行計測の様子(左)とセンサー部(右) 出典:NEDO比較的粗い飛行間隔で網羅的な探査を行う広域探査では、以前建設されていた実験施設の地下に残された構造物は検知できたものの、浅部の埋没車両はわずかに把握できる程度だった。次に広域探査で特定した埋没車両があると思われるエリアを対象に、より細かく詳細に探査する精密探査を実施。その結果、今度は浅部の埋没車両を明瞭に検出できたという。また、深部の埋没車両もわずかながら検出できたとしている。
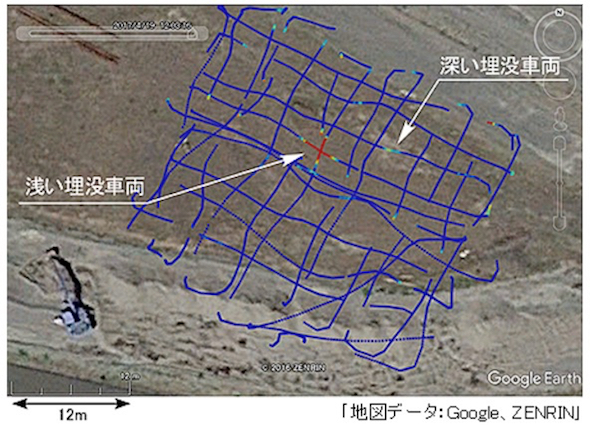 精密ドローン航行計測による探査データ 出典:NEDO
精密ドローン航行計測による探査データ 出典:NEDONEDOは「今回の実証実験のようなドローンを使用した埋没車両探査の例は少なく、今回の実験で成功により、実用化への道を開いた」としている。今後は実用化に向けて、システムの改良を進める計画だ。実際の災害現場は地形が急しゅんな場合が多いため、センサーをつり下げた状態での航行が不安定になる可能性がある。そこで今後はより実際の状況に近い、起伏の大きな地形の実験サイトでの実証試験を行い、システムの改良を継続する。中長期的には開発した技術を民間企業などに橋渡しし、実用化を図る方針だ。
関連記事
 ドローン測量の課題をクリア、座標を自動取得する対空標識
ドローン測量の課題をクリア、座標を自動取得する対空標識
建設現場でドローンを使った3D測量が広がっている。効率よく測量が行えるメリットがあるが、現場の課題となっているのが対空標識の設置と測量に手間と時間がかかる点だ。テラドローンはこうした課題を解決するGPS内蔵の対空標識の販売を開始した。自動で位置情報を取得でき、置くだけでTS測量を省くことができる。価格も数万円と安価に設定した。 東電とゼンリン、ドローンの安全飛行へ「空の道を創る」
東電とゼンリン、ドローンの安全飛行へ「空の道を創る」
東京電力ホールディングスとゼンリンは、両社が持つインフラデータを組み合わせることで、ドローンの安全飛行を支援する「ドローンハイウェイ構想」実現に向けて業務提携を行った。 スタジアム管理にドローン活用、自動航行で目視点検を効率化
スタジアム管理にドローン活用、自動航行で目視点検を効率化
不動産管理の東急コミュニティーは、施設管理業務にドローンを導入する。まず静岡県袋井市の競技場の管理に導入する計画で、従来作業員が目視で行っていた高所の点検などに活用し、業務効率と安全性の向上を図る計画だ。
Copyright © ITmedia, Inc. All Rights Reserved.
人気記事トップ10
- クボタが“原点回帰”のオレンジ色に一新 8トン中型建機を日本市場に投入
- ボルボ建機のフラグシップ機が日本上陸 都市部の狭小地でも36トン級のパワー発揮
- 書類確認をAIが自動化! 「建設サイト・シリーズ」の新機能と現場データ主軸のDX戦略
- “3K”を払拭するアクティオの長野新工場が稼働開始 建機洗浄の自動化など最新設備を導入
- 建設現場で3Dデータ活用が進まない理由と突破口【ローカスブルー解説】
- 鉄建建設、社内AIチャットに技術伝承機能を追加 ベテランの暗黙知を形式知化
- 猛暑時代の建築に新たな選択肢、建物外壁を冷やす「Cool Skin」が特許出願
- 脱炭素コンクリ2種が国交省直轄工事に大量適用、鹿島の「GXインフラ」技術
- 無電源/無通信でもドローンポート活用 太陽光パネル/蓄電池/Starlinkをセット提供
- AIでプラント寿命を予測 千代田化工建設とNovityが運用保守で協業





![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。