完全自律で石こうボード施工を行う“ヒト型ロボット”、37の関節軸数とAIを搭載:建築×ロボット(2/3 ページ)
産業技術総合研究所(産総研)は、建築現場で重労働を担うヒト型のロボット試作機「HRP-5P」を開発した。人間に近い動きを再現するため、多数の関節とロボット知能を搭載し、人の手を借りずにロボットだけで、石こうボードを運び、住宅内壁にビス打ちを行う。実用化は民間企業との連携も視野に入れ、数年以内を目指す。
設定された回数を再試行して、作業を遂行するようにプログラム

駆動は、高出力モーターや駆動機構への冷却の導入、一部の関節での複数モーターによる関節駆動方式を採用し、HRP-2改に比べて関節トルク、速度ともに平均で約2倍に向上。これにより、腕を水平に伸ばした状態での片腕の可搬重量で2.9kgと、石こうボードを平積み状態から持ち上げる重負荷作業に耐えられるようになった。
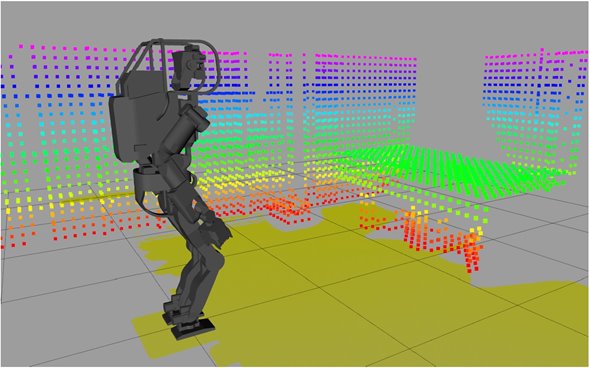
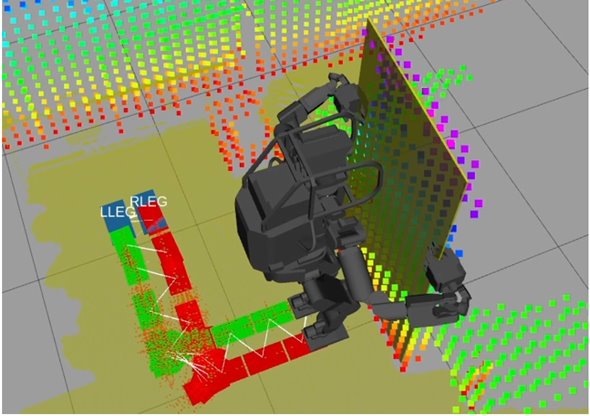
周辺環境の認識には、頭部の複合センサーで常時3次元計測している。計測結果の蓄積や記憶の更新で、石こうボードなどで視野が制限される状況でも、搬送の歩行計画や足部の滑りなどに対して歩行を補正。作業対象物の画像データベースを用いて学習を行うことで、背景や照明の条件が悪い状況でも、90%以上の高精度で対象物を検出する。
石こうボード施工の手順では、ロボットは周辺環境を3次元で地図生成して認識。物体の検出も行いつつ、作業台へと近づく。作業台に寄りかかり、平積みされた石こうボードを1枚ずらし、持ち上げて壁まで運ぶ。壁にボードを立てかけた後は、産総研が開発した高精度ARマーカーで工具を認識し、拾い上げる。柱と柱の間に横向きに打ち付けられた木材「胴縁」をロボットが握って、安定性を確保しながら、壁に石こうボードをビスで固定する。

ビスを打つ位置の認識は、狭い部屋とロボットの相対位置を計測し、石こうボードを建て掛ける際に、部屋に対する石こうボードの位置決めを行う。建て掛けた後は、部屋とロボットの相対位置関係に基づいて、間柱や胴縁の決められた位置にビスを打ち込む。
作業時間は、1.8×0.9m(メートル)のボードの右側縦(1.8mの辺)に、5カ所ビス打ちを行い、おおよそ1分弱。ただ、大きく列が変わる場合は、部屋とロボットの相対位置関係を再計測して、横移動で対応するため、その分作業時間がかかることが想定される。
今回のテストでは、オペレーターが端末から「ロボットの作業開始命令」を出したが、その後は基本的にロボットによる自律作業で実施した。物体認識が失敗した際の再認識実行や対象物をうまく握れなかった場合の再把持など、ある条件をクリアしなかったら事前に設定された回数を再試行して、各作業を遂行するようにプログラムされている。
作業中にもし、ロボットが自ら判断できない、安全優先判断をした場合など、動作停止が発生したときは、ロボットがオペレーターに助けを求める。そのため、オペレーターは必ずしも現場でロボットを見守る必要がなく、助けを求められた際に対処するだけで、遠隔からの操作も可能だという。

Copyright © ITmedia, Inc. All Rights Reserved.