—حگGٹo“`’B‹Zڈp‚ً—ک—p‚µ‚½پu‰“ٹu‘€چىƒVƒXƒeƒ€پv‚ًٹJ”
‘هگ¬Œڑگف‚حپAگH•i‚âˆم–ٍ•iگ»‘¢چHڈêŒü‚¯‚ج‰“ٹu‘€چىƒVƒXƒeƒ€‚ًٹJ”‚µ‚½پB”ؤ—pگ«‚ًژ‚½‚¹‚邽‚كپAƒچƒ{ƒbƒg‚ح2–{ژw‚جƒVƒ“ƒvƒ‹ƒ^ƒCƒv‚إپA”÷–‚ب—ح‰ءŒ¸‚ً“`’B‚µپAچى‹ئژèڈ‡‚ً‹L‰¯‚³‚¹‚éپB
پ@‘هگ¬Œڑگف‚ح2018”N7Œژ3“ْپAگ¶ژYژ{گفŒü‚¯‚ةپA—حگGٹo“`’B‹Zڈp‚ً—ک—p‚µ‚½‰“ٹu‘€چىƒVƒXƒeƒ€‚جƒvƒچƒgƒ^ƒCƒv‚ًٹJ”‚µ‚½پBŒ»ڈê‚ة‚ ‚éƒچƒ{ƒbƒgƒAپ[ƒ€‚ً—حگGٹoƒOƒچپ[ƒu‚إپA—£‚ꂽڈêڈٹ‚©‚ç‘€چى‚إ‚«پA”÷–‚ب—ح‰ءŒ¸‚ًچؤŒ»‚·‚éپBژہ—p‰»‚·‚ê‚خپAچHڈê‚ب‚ا‚ةژہچغ‚ةچs‚©‚ب‚‚ئ‚àپA‰“ٹu’n‚©‚ç‚جƒ‚ƒjƒ^پ[‰z‚µ‚إپA‘@چׂبچى‹ئ‚ھ‰آ”\‚ة‚ب‚èپAƒeƒŒƒCƒOƒWƒXƒ^ƒ“ƒXپiTelexistenceپj‚جٹآ‹«‚ھژہŒ»‚·‚éپB
پu—ح‰ءŒ¸پv‚ًگ³ٹm‚ة“`’B‚µپAچׂ©‚¢ژèچى‹ئ‚ً‰“ٹu‰»
پ@‘هگ¬Œڑگف‚إ‚ح2017”N“x‚و‚èپA5–{ژw‚جƒچƒ{ƒbƒgƒAپ[ƒ€‚ئپA‚±‚ê‚ً‘€چى‚·‚é—حگGٹoƒOƒچپ[ƒu‚ً‘g‚فچ‡‚¹‚ؤپA‰“ٹu‘€چى‚·‚éڈ‰ٹْƒvƒچƒgƒ^ƒCƒv‚جٹJ”‚ة’…ژ肵‚½پB‰“ٹu‘€چىƒVƒXƒeƒ€‚إ‚حپA•¨‘ج‚ً‚آ‚©‚قچغ‚ج”÷–‚ب—ح‰ءŒ¸‚جڈî•ٌ‚ً‘o•ûŒü‚ة“`’B‚إ‚«پAچى‹ئˆُ‚ة‚و‚éژèچى‹ئ‚ً‚¢‚آ‚إ‚à‚ا‚±‚إ‚à‰“ٹu‘€چى‚·‚邱‚ئ‚ھ‰آ”\‚ة‚ب‚éپBڈ«—ˆ“I‚ة‚حچى‹ئژèڈ‡‚â—ح‰ءŒ¸‚ب‚ا‚ًٹwڈKپEچؤگ¶‚µپAچإ“K‚بچى‹ئƒpƒ^پ[ƒ“‚جژہŒ»‚ً–عژw‚·پB
پ@‚µ‚©‚µپAٹJ”‰ك’ِ‚ة‚¨‚¢‚ؤپAƒVƒXƒeƒ€چ\گ¬‚ھ•،ژG‚إپA‚©‚آ‘€چىژز‚ة‚و‚éƒچƒ{ƒbƒgƒnƒ“ƒh‚ب‚ا‚ج“®چىگ§Œن‚ھ“‚پAˆê”تƒ†پ[ƒUپ[‚ج‘€چىڈKڈn‚ة‚حژٹش‚âŒoŒ±‚ً—v‚·‚é‚ئ‚¢‚¤‰غ‘è‚ھگ¶‚¶‚ؤ‚¢‚½پB
پ@‘هگ¬Œڑگف‚حپA—حگGٹo“`’B‹Zڈp‚ج•پ‹y“WٹJ‚ًگi‚ك‚éڈم‚إپAڈل•ا‚ئ‚ب‚肤‚éڈم‹L‰غ‘è‚ً‰ًŒˆ‚·‚ׂپA2017”N“xٹJ”‚µ‚½ڈ‰ٹْƒvƒچƒgƒ^ƒCƒv‚ً‰ü—ا‚µپAƒVƒXƒeƒ€چ\گ¬پAŒ`ڈَپA‘€چىگ«‚ج’Pڈƒ‰»‚ة‚آ‚¢‚ؤŒں“¢‚ًگi‚ك‚ؤ‚«‚½پB

پ@چ،‰ٌپAٹJ”‚µ‚½ƒvƒچƒgƒ^ƒCƒv‚حپAژہچغ‚جگ¶ژYŒ»ڈê‚ة‚à“±“ü‚µ‚â‚·‚¢”ؤ—p•i‚ً—p‚¢پAƒچƒ{ƒbƒg‚ج2–{ژw‚جƒVƒ“ƒvƒ‹‚بچ\گ¬پB’N‚إ‚à—eˆص‚ة‰“ٹu‚©‚çƒچƒ{ƒbƒg‚ً’¼گع‘€چى‚µپAچى‹ئژèڈ‡‚â—ح‰ءŒ¸‚ب‚ا‚ج“®‚«‚ً‹L‰¯‚³‚¹‚éچH•v‚ھ‚ب‚³‚ê‚ؤ‚¢‚éپB“±“ü‘z’èگو‚ئ‚µ‚ؤ‚حپAگH•i‚âˆم–ٍ•iگ»‘¢چHڈê‚ب‚ا‚¾‚ئ‚¢‚¤پB
پ@ƒVƒXƒeƒ€‚جƒRƒ“ƒgƒچپ[ƒ‹‚ة‚حپA“چ‡گ§Œنƒ\ƒtƒgƒEƒFƒA‚إ‚ ‚éTwinCAT‚ً‘g‚فچ‡‚ي‚¹‚½ƒxƒbƒRƒtƒIپ[ƒgƒپپ[ƒVƒ‡ƒ“ژذ‚ج’´ڈ¬Œ^ژY‹ئ—pPCپuC6015پv‚ًچج—p‚µپAڈبƒXƒyپ[ƒX‰»‚ًگ}‚éپB‘€چىƒfپ[ƒ^پiچى‹ئژèڈ‡¤چى‹ئژ‚جژہ‰f‘œ¤—ح‰ءŒ¸‚ب‚اپj‚ج•غ‘¶پE’~گد‚ة‚و‚èپAڈ«—ˆ“I‚ةAI‚ًچج—p‚µ‚½چى‹ئ‚ئ‚جکA“®‚ًگ}‚邱‚ئ‚à‘z’肵‚ؤ‚¢‚éپB
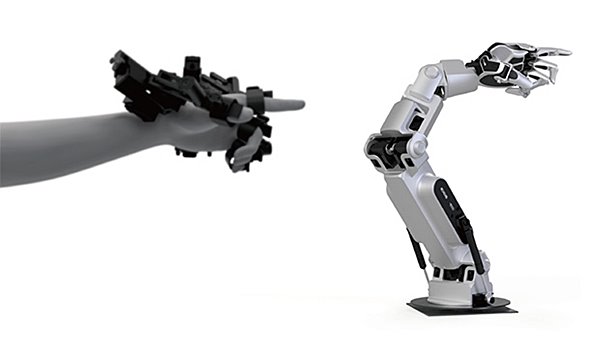
پ@‘€چى‘¤‚إ‚حپAƒfƒ“ƒ\پ[ƒEƒFپ[ƒuژذ‚جڈ¬Œ^6ژ²‚إگl‚ئ‹¦“‚·‚éƒچƒ{ƒbƒgپuCOBOTTAپv‚ًƒ}ƒXƒ^پ[‘¤‚ة“±“üپBƒچƒ{ƒbƒgƒAپ[ƒ€گو’[‚ة‚حپA‘€چىژز‚ھژw‚âژè‚ة—eˆص‚ة‘•’…‚إ‚«‚éƒCƒNƒVپ[ژذ‚جƒOƒٹƒbƒvŒ^—حگGٹo’ٌژ¦ƒfƒoƒCƒXپuEXOS Gripperپv‚ً“±“ü‚·‚éپB
پ@‰“ٹuƒچƒ{ƒbƒg‚حپA‘@چׂب“®‚«‚ة‚à’اڈ]‰آ”\‚بƒfƒ“ƒ\پ[ƒEƒFپ[ƒu‚جگ‚’¼‘½ٹضگكƒچƒ{ƒbƒgپuVSƒVƒٹپ[ƒYپvپB“چ‡گ§Œنƒ\ƒtƒgƒEƒFƒA‚حپAگ¶ژYŒ»ڈê‚إ‚ج‰“ٹu‘€چىگ§Œن—p’تگM‚ة‘ٹ“–‚·‚éƒlƒbƒgƒڈپ[ƒN‚ةپAƒIپ[ƒvƒ“‚بƒxƒbƒRƒtƒIپ[ƒgƒپپ[ƒVƒ‡ƒ“ژذ‚جپuEtherCATپv‚ً—p‚¢‚éپB
پ@ƒVƒXƒeƒ€“±“ü‚ة‚و‚èپAگ»‘¢ƒGƒٹƒA‚إ‚جڈبگl‰»‚ًگ}‚èپA‹ك‚¢ڈ«—ˆIoTپAAI‚ًƒRƒA‚ئ‚µ‚½ƒXƒ}پ[ƒg‰»‚ئچ‡‚ي‚¹پAگ¶ژYگ«Œüڈم‚ة‚آ‚ب‚°پA–³گl‰»‚âƒچƒ{ƒbƒg–{‘ج‚جڈبƒGƒl‰»‚ة‚و‚é‹َ’²پEڈئ–¾‚ب‚ا‚ج‰^—pƒRƒXƒg‚ً’لŒ¸‚·‚éپB
پ@‚±‚جƒVƒXƒeƒ€‚ًژg‚¦‚خپAڈêڈٹ‚âژٹش‚ً–â‚ي‚¸‚ة24ژٹش‚إچى‹ئ‚ھ‰آ”\‚ب‚½‚كپAٹCٹO‚©‚ç‚إ‚à“ْ–{‚ئ‚جژچ·‚ًگ¶‚©‚µ‚ؤپAŒ»’nکJ“—ح‚ھٹˆ—p‚إ‚«‚é‚ب‚ا‚جگV‚µ‚¢ƒڈپ[ƒNƒXƒ^ƒCƒ‹‚ً‘nڈo‚إ‚«‚é‚ئ‚µ‚ؤ‚¢‚éپB
Copyright © ITmedia, Inc. All Rights Reserved.
ٹضکA‹Lژ–
 گl‚ئ‹@ٹB‚ھ‹¦“‚µ‚â‚·‚پAپu‚©‚ç‚‚èپvƒچƒ{ƒbƒgƒnƒ“ƒh‚ًگVٹJ”
گl‚ئ‹@ٹB‚ھ‹¦“‚µ‚â‚·‚پAپu‚©‚ç‚‚èپvƒچƒ{ƒbƒgƒnƒ“ƒh‚ًگVٹJ”
NEDO‚ئƒ_ƒuƒ‹‹ZŒ¤پA“s—§ژY‹ئ‹Zڈpچ‚گê‚حپA’Pڈƒ‚بگ§Œن‚¾‚¯‚إ‘½—l‚بŒ`ڈَ‚جƒڈپ[ƒN‚ًˆہ’肵‚ؤ”cژ‚إ‚«‚éƒچƒ{ƒbƒgƒnƒ“ƒhگV‹@چ\‚جٹJ”‚ةگ¬Œ÷‚µ‚½‚ئ”•\‚µ‚½پB•،ژG‚ب“dژqگ§Œن‚ض‚جˆث‘¶‚ًچإڈ¬Œہ‚ة—}‚¦پAچ‚گ«”\‚بƒچƒ{ƒbƒgƒnƒ“ƒh‚ھژہŒ»‚إ‚«‚éپB ”“d‹@‚ج“_Œںچى‹ئ‚ً’´’ZڈkپAژO•H“d‹@‚ھ”–Œ^ƒچƒ{ƒbƒg
”“d‹@‚ج“_Œںچى‹ئ‚ً’´’ZڈkپAژO•H“d‹@‚ھ”–Œ^ƒچƒ{ƒbƒg
ژO•H“d‹@‚ح“d—ح‰ïژذ‚ب‚ا‚ھڈٹ—L‚·‚锓d‹@‚ًپA’Z‚¢ٹْٹش‚إچ‚گ¸“x‚ة“_Œں‚إ‚«‚é”–Œ^“_Œںƒچƒ{ƒbƒg‚ًٹJ”‚µ‚½‚ئ”•\‚µ‚½پBŒْ‚ف‚ح19.9mm‚إپA”“d‹@‚جŒإ’èژq‚ئ‰ٌ“]ژq‚جٹش‚ةگN“ü‚µپA‘إگfŒںچ¸‚ئژB‰e‚ًژہچs‚إ‚«‚éپB 2‘ج‚جƒچƒ{ƒbƒg‚ھپA‰ïکb‚µ‚ب‚ھ‚ç“Vˆنگخ‚±‚¤ƒ{پ[ƒh‚ً“\‚é
2‘ج‚جƒچƒ{ƒbƒg‚ھپA‰ïکb‚µ‚ب‚ھ‚ç“Vˆنگخ‚±‚¤ƒ{پ[ƒh‚ً“\‚é
ŒثŒڑ‚ؤڈZ‘î‚àٹـ‚ك‚½ŒڑگفŒ»ڈê‚إپA“Vˆن‚جگخ‚±‚¤ƒ{پ[ƒh‚ً“\‚é2‘ج‚جƒچƒ{ƒbƒg‚ھٹJ”‚³‚ꂽپBAI‚إ‚¨Œف‚¢‚ةƒRƒ~ƒ…ƒjƒPپ[ƒVƒ‡ƒ“‚ًژو‚èپAچى‹ئˆت’u‚âژ{چH‰سڈٹ‚ً‹¤—L‚µ‚ؤŒّ—¦“I‚ب“\‚è•t‚¯چHژ–‚ًچs‚¤پB ژخ’£‹´‚ج’²چ¸ƒچƒ{ƒbƒg‚ةƒJƒپƒ‰3‘ن’ا‰ء‚ب‚ا‚جگV‹@”\پAگ¼ڈ¼Œڑگف
ژخ’£‹´‚ج’²چ¸ƒچƒ{ƒbƒg‚ةƒJƒپƒ‰3‘ن’ا‰ء‚ب‚ا‚جگV‹@”\پAگ¼ڈ¼Œڑگف
گ¼ڈ¼Œڑگف‚حچ²‰ê‘هٹw‚جˆة“،چKچL‹³ژِ‚ئ‹¤“¯ٹJ”‚µ‚½ژخ’£‹´‚جژخچق•غŒىٹا‚جژ©‘–ژ®’²چ¸ƒچƒ{ƒbƒgپuƒRƒچƒRƒچƒ`ƒFƒbƒJپ[پv‚ةگV‚½‚ب‹@”\‚ً“‹چع‚µ‚½پBگV‹@”\‚حپAگiچs•ûŒü‚ج‘O–ت‚ةƒtƒ‹ƒnƒCƒrƒWƒ‡ƒ“ƒJƒپƒ‰‚ً3‘ن‘•”ُ‚µپA‚±‚ê‚ـ‚إ’²چ¸‚ھ‚إ‚«‚ب‚©‚ء‚½ژه“ƒگع‘±•”‚جڈَ‹µ‚ًٹm”F‚إ‚«‚é‚و‚¤‚ة‚µ‚½پB