老朽化インフラ検査へのロボット活用、早期実用化へNEDOが実証:情報化施工
ダムや橋梁など国内のインフラの老朽化が課題となる中で、注目が集まっているのがロボットを活用による点検作業の効率化に注目が集まっている。NEDOはこうしたロボットの早期実用化に向け、神奈川県内で実証を開始する。
新エネルギー・産業技術総合開発機構(NEDO)は同機構のプロジェクトで、カメラ製造のキュー・アイ(横浜市)が開発したキュー・アイが開発したダム調査ロボットシステムと、富士フイルムが開発した橋梁点検用ロボットの実証試験を神奈川県内で実施する。
ダムや橋梁などの社会インフラは、今後、建設から50年を経過するものが加速度的に増加し、それらの老朽化に対応するための十分な資金と高度な維持管理の専門知識を有する人材不足が大きな社会問題となっている。こうした状況の中でNEDOでは2014年度から「インフラ維持管理・更新等の社会課題対応システム開発プロジェクト」で、ダムや橋梁など既存インフラの状態に応じた効果的かつ効率的な維持管理・更新などを図る取り組みを実施。インフラ構造物に対して人間の立ち入りが困難な箇所へ移動し、インフラの維持管理に必要な情報を取得するロボットの研究開発を推進している。
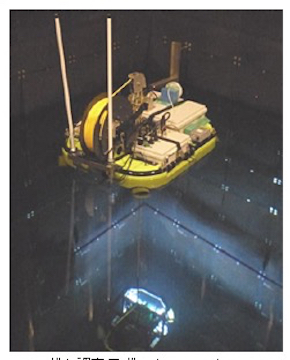
同プロジェクトではキュー・アイが開発したダム調査ロボットシステムと、富士フイルムが開発した橋梁点検用ロボットの実証試験を神奈川県内のダムと道路橋でそれぞれ2016年10月に実施する(図1)。具体的にはキュー・アイが10月24、25の両日、城山ダム(神奈川県相模原市)で自航可能な水中ロボットとそれを水面から吊り下げる水上ロボットの連携動作により、ダム施設の堤体の水中部をカメラで撮影する。劣化状態の点検を行うため、水中ロボットによる壁面の自動調査機能や、水上ロボットが壁面に吸着し、停留する機能などについて実証を行い、その有効性を検証する。
富士フイルムは、イクシスリサーチおよび首都高速道路技術センターと共同で開発した、橋梁点検用のステレオカメラ(複眼式撮像装置)を搭載した橋梁近接目視代替ロボットを用いて部材の写真撮影・録画を行い、データを収集する。実施日、場所は同年10月28日で、毘沙門橋(神奈川県伊勢原市)にて行う(図2)。

今回の実証試験は、さがみロボット産業特区の取り組みの一環で、今年5月に神奈川県が公募した「ロボット実証実験支援事業」の支援によるもの。今後、両社は神奈川県と連携しながらダムおよび橋梁点検用ロボットの早期実用化を目指す。
Copyright © ITmedia, Inc. All Rights Reserved.
関連記事
 「すごい目」のロボットで橋梁点検を効率化、0.1mmの亀裂も捉える
「すごい目」のロボットで橋梁点検を効率化、0.1mmの亀裂も捉える
NEDOプロジェクトで橋梁点検ロボットの開発を進めているイクシスリサーチは、神奈川県川崎市内にある道路橋で、実証試験の様子を公開した。主桁下フランジにつり下げるロボットで、ステレオカメラを使ってクラックや鋼材の腐食などを高精度に確認できる。目視で行われている橋梁点検作業の効率化に貢献するロボットとして早期の実用化を目指す方針だ。 インフラ維持管理へのロボット活用に本腰、NEDOが評価基準の策定へ
インフラ維持管理へのロボット活用に本腰、NEDOが評価基準の策定へ
NEDOはインフラ維持管理ロボットの開発強化とロボットの性能や試験方法の基準作成に着手する。インフラ点検、物流、災害対応などのさまざまな分野におけるロボットの活用を後押しする狙いだ。 建設機械で「無人化施工」、改造不要で遠隔操作を可能に
建設機械で「無人化施工」、改造不要で遠隔操作を可能に
大林組と大裕は既存の建設機械に装着することで、遠隔操作が行える装置を開発した。建設機械自体を改造することなく無人化施工を可能にし、災害復旧作業における二次災害の低減などに貢献する。